目录 1 概述 概述 SINA_POS(FB284) 介绍 项目配置 软硬件要求 配置步骤 基本定位块功能说明... Error! Bookmark not defined. 4.1 概述 使用 SI
|
|
|
- 速 祖
- 5 years ago
- Views:
Transcription
1 常问问题 11/2016 S 通过 FB284 实现 V90PN 的 EPOS 功能 S FB284 EPOS Unrestricted
2 目录 1 概述 概述 SINA_POS(FB284) 介绍 项目配置 软硬件要求 配置步骤 基本定位块功能说明... Error! Bookmark not defined. 4.1 概述 使用 SINA_POS(FB284) 功能块的运行模式介绍 基于 ModePos 值的运行模式切换说明 Unrestricted 2
,PLC 通过 111 报文及 TIA Portal 提供的驱动库中的功能块")

3 1 概述 S 可以通过 PROFINET 通讯连接 SINMICS V90 伺服驱动器, 将 V90 驱动器的控制模式设置为 基本位置控制 (EPOS),PLC 通过 111 报文及 TIA Portal 提供的驱动库中的功能块 FB284 可实现 V90 的 EPOS 基本定位控制, 控制系统连接如图 1-1 所示 图 1-1 控制系统图 PLC 通过库中的驱动功能块的调用原理如图 1-2 所示 : 图 1-2 驱动功能块调用原理 SIMATIC S 中的编程由下述部分组成 : Unrestricted 3
 功能块管脚介绍 S7-1200 控制 V90PN 实现 EPOS 基本定位控制的功能块 FB284 在命令库中的位置如图 2-1 所示 : 图 2-1 功能块 FB284 功能块可在下述 OB 中进行调用 : 循环任务 :OB1 循环中断 OB: 如 OB32 此功能块可循环激活 SINAMICS 驱动中的基本定位工艺功能,")
4 (1) 循环数据交换 SINA_POS (FB284), SINA_SPEED (FB285) 此功能块实现 PLC 与 SINAMICS S/G 驱动器的命令及状态周期性通讯, 如电机的运行命令 位置及速度设定点等或接收驱动器的状态及速度实际值等 (2) 非周期性通讯的参数获取 SINA_PARA (FB286): 此功能块实现 PLC 读取 SINAMICS S/G 的参数访问, 如读取或写入数据块参数等 2 SINA_POS(FB284) 功能块管脚介绍 S 控制 V90PN 实现 EPOS 基本定位控制的功能块 FB284 在命令库中的位置如图 2-1 所示 : 图 2-1 功能块 FB284 功能块可在下述 OB 中进行调用 : 循环任务 :OB1 循环中断 OB: 如 OB32 此功能块可循环激活 SINAMICS 驱动中的基本定位工艺功能, 需注意在驱动侧必须使用西门子标准报文 111 FB284 功能块管脚解释见表 2-1: 表 2-1 FB284 功能块管脚解释 管脚数据类型默认值描述 输入 ModePos INT 0 运行模式 : 1 = 相对定位 2 = 绝对定位 3 = 连续位置运行 Unrestricted 4
5 4 = 回零操作 5 = 设置回零位置 6 = 运行位置块 = 点动 jog 8 = 点动增量 EnableAxis BOOL 0 运行命令 : 0 = OFF1, 1 = ON CancelTransing BOOL 1 0 = 拒绝激活的运行任务 1 = 不拒绝 IntermediateStop BOOL 1 立即停止 : 0 = 中断激活的运行命令拒绝激活的运行任务 1 = 不立即停止 Positive BOOL 0 正方向 Negative BOOL 0 负方向 Jog1 BOOL 0 正向点动 ( 信号源 1) Jog2 BOOL 0 正向点动 ( 信号源 2) FlyRef BOOL 0 0 = 不选择运行中回零 1 = 选择运行中回零 AckError BOOL 0 故障复位 ExecuteMode BOOL 0 激活定位工作或接收设定点 Position DINT 0[LU] 对于运行模式, 直接设定位置值 [LU] /MDI 或运行的块号 Velocity DINT 0 MDI 运行模式时的速度设置 [LU/min] [LU/min] OverV INT 100[%] 所有运行模式下的速度倍率 0-199% OverAcc INT 100[%] 直接设定值 /MDI 模式下的加速度倍率 0-100% OverDec INT 100[%] 直接设定值 /MDI 模式下的减速度倍率 0-100% Unrestricted 5
6 ConfigEPOS DWORD 0 可以通过此管脚传输 111 报文的 STW1,STW2,EPosSTW1,EPosSTW2 中的位, 传输位的对应关系如下表所示 : ConfigEPos 位 111 报文位 ConfigEPos.%X0 STW1.%X1 ConfigEPos.%X1 STW1.%X2 ConfigEPos.%X2 EPosSTW2.%X14 ConfigEPos.%X3 EPosSTW2.%X15 ConfigEPos.%X4 EPosSTW2.%X11 ConfigEPos.%X5 EPosSTW2.%X10 ConfigEPos.%X6 EPosSTW2.%X2 ConfigEPos.%X7 STW1.%X13 ConfigEPos.%X8 EPosSTW1.%X12 ConfigEPos.%X9 STW2.%X0 ConfigEPos.%X10 STW2.%X1 ConfigEPos.%X11 STW2.%X2 ConfigEPos.%X12 STW2.%X3 ConfigEPos.%X13 STW2.%X4 ConfigEPos.%X14 STW2.%X7 ConfigEPos.%X15 STW1.%X14 ConfigEPos.%X16 STW1.%X15 ConfigEPos.%X17 EPosSTW1.%X6 ConfigEPos.%X18 EPosSTW1.%X7 ConfigEPos.%X19 EPosSTW1.%X11 ConfigEPos.%X20 EPosSTW1.%X13 ConfigEPos.%X21 EPosSTW2.%X3 ConfigEPos.%X22 EPosSTW2.%X4 ConfigEPos.%X23 EPosSTW2.%X6 ConfigEPos.%X24 EPosSTW2.%X7 ConfigEPos.%X25 EPosSTW2.%X12 ConfigEPos.%X26 EPosSTW2.%X13 ConfigEPos.%X27 STW2.%X5 ConfigEPos.%X28 STW2.%X6 ConfigEPos.%X29 STW2.%X8 ConfigEPos.%X30 STW2.%X9 可通过此方式传输硬件限位使能 回零开关信号等给 V90 LADDRSP HW_IO 0 符号名或 SIMATIC S 设定值槽的 HW ID (SetPoint) LADDRAV HW_IO 0 符号名或 SIMATIC S 实际值槽的 HW ID (Actual Value) 输出 Error BOOL 0 1= 错误出现 ErrorId INT 0 运行模式错误 / 块错误 : 0 = 无错误 1 = 通讯激活 Unrestricted 6
7 2 = 选择了不正确的运行模式 3 = 设置的参数不正确 4 = 无效的运行块号 5 = 驱动故障激活 6 = 激活了开关禁止 7 = 运行中回零不能开始 Busy BOOL 0 运行模式被执行或使能 Done BOOL 0 运行模式使能无错误 AxisEnabled BOOL 0 驱动已使能 AxisErr BOOL 0 驱动故障 AxisWarn BOOL 0 驱动报警 AxisPosOk BOOL 0 轴的目标位置到达 AxisRef BOOL 0 回零位置设置 VeloAct DINT 0 当前速度 [LU/min] [LU/min] PosAct DINT 0 当前位置 LU [LU/min] ActMode INT 0 当前激活的运行模式 EPosZSW1 WORD 0 EPOS ZSW1 的状态 EPosZSW2 WORD 0 EPOS ZSW2 的状态 WarnAct WORD 0 当前的报警代码 FaultAct WORD 0 当前的故障代码 DiagID WORD 0 扩展的通讯故障 3 SINA_POS 功能块的功能实现 3.1 概述 V90 PN 的基本定位 (EPOS) 是一个非常重要的功能, 用于驱动的位置控制 它可用于直线轴或旋转轴的绝对及相对定位, 博途软件库文件中的 SINA_POS 功能模块可用于 SINAMICS S/G 系统驱动器的基本定位控制 此外, 需要在 V90 的 V-Assist 软件中将控制模式设置为 基本定位 (EPOS) 模式, 激活基本定位器, 并选择西门子标准 111 报文 闭环位置控制器包含下述部分 : 实际位置值准备 ( 包括测量输入评价及寻找参考点 ) 位置控制器 ( 包括限制 适配 预控制计算 ) 监控 ( 静止, 定位及动态跟踪误差监控 ) 基本位置控制器还可实现下述功能 : 机械系统 : 齿轮间隙补偿 模态轴 位置跟踪 / 限制 速度 / 加速度 / 延迟限制 软件限位开关 硬件限位开关 位置 / 静止监控 动态跟踪误差监控主要运行模式有 Jog Homing MDI 程序块几种, 关于 SINAMICS SV90 的基本定位功能的详细描述请参考 V90 PN 的操作手册 Unrestricted 7
8 3.2 SINA_POS(FB284) 运行模式 运行条件 (1) 轴通过输入管脚 EnableAxis = 1,OFF2 及 OFF3 内部已置 1 如果轴已准备好并驱动无故障 (AxisErr= "0"),EnableAxis 置 1 后轴使能, 输出管脚 AxisEnabled 信号变为 1 (2) ModePos 输入管脚用于运行模式的选择 可在不同的运行模式下进行切换, 如 : 连续运行模式 (ModePos=3) 在运行中可以切换到绝对定位模式 (ModePos=2) (3) 输入信号 CancelTransing,IntermediateStop 对于除了点动之外的所有运行模式均有效, 在运行 EPOS 时必须将其设置为 "1, 设置说明如下 : 设置 CancelTransing, 轴按最大减速度停止, 丢弃工作数据, 轴停止后可进行运行模式的切换 设置 IntermediateStop=0, 使用当前应用的减速度值进行斜坡停车, 不丢弃工作数据, 如果重新再设置 IntermediateStop=1 后轴会继续运行, 可理为轴的暂停 可以在轴静止后进行运行模式的切换 在任何运行模式下都可以通过 FlyRef 输入来选择运行中回零的功能 (4) 激活硬件限位开关 如果使用了硬件限位开关, 需要将 FB284 功能块的输入管脚 ConfigEPos.%X3(POS_STW2.15 ) 置 1, 激活 V90 PN 的硬件限位功能 正 负向的硬件限位开关可连接到 V90 PN 驱动器的定义为 WCL CCWL 的 DI 点 ( DI1 至 DI4 ) (5) 激活软件限位开关 如果使用了软件限位开关, 需要将 FB284 功能块的输入管脚 ConfigEPos.%X2(POS_STW2.14 ) 置 1, 激活 V90 PN 的软件限位功能 (P2582) 在 V90 PN 中设置 p2580( 负向软限位位置 ) p2581( 正向软限位位置 ) 绝对定位运行模式 绝对定位 运行模式可通过驱动功能 MDI 绝对定位 来实现, 它采用 SINAMICS 驱动的内部位置控制器来实现绝对位置控制 要求 : 运行模式选择 ModePos=2 轴使能 EnableAxis =1 轴必须已回零或编码器已被校正 如果切换模式大于 3, 轴必须为静止状态, 在任意时刻可以在 MDI 运行模式内进行切换 (ModePos=1,2,3) Unrestricted 8
9 步骤 : 通过输入参数 Position, Velocity, 指定目标位置及动态响应参数 通过输入参数 OverV OverAcc OverDec 指定速度 加减速度的倍率 运行条件 "CancelTransing" 及 "IntermediateStop" 必须设置为 "1",Jog1 及 Jog2 必须设置为 "0" 在绝对定位中, 运行方向可以按照最短路径运行至目标位置, 此时输入参数 Positive 及 Negative 必须为 "0" 通过 ExecuteMode 的上升沿触发定位运动, 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 当目标位置到达后通过 AxisPosOk 及 Done 置 1, 当定位过程中出现错误, 则输出参数 Error 置 1 注意 : 当前正在运行的命令可以通过 ExecuteMode 上升沿被新命令替换, 但仅用于运行模式 ModePos 1,2,3 控制时序示例如图 3-1 所示 图 3-1 绝对定位模式控制时序 相对定位运行模式 相对定位 运行模式可通过驱动功能 MDI 相对定位 来实现, 它采用 SINAMICS 驱动的内部位置控制器来实现相对位置控制 要求 : 运行模式选择 ModePos=1 驱动的运行命令 EnableAxis=1 轴可以不回零或不校正绝对值编码器 如果切换模式大于 3, 轴必须为静止状态, 在任意时刻可以在 MDI 运行模式内进行切换 (ModePos=1,2,3) 相对定位的方向由位置给定的符号来决定步骤 : 通过输入参数 Position, Velocity 指定目标位置及动态响应参数 Unrestricted 9
10 通过输入参数 OverV OverAcc OverDec 指定速度 加减速度的倍率 运行条件 "CancelTransing" 及 "IntermediateStop" 必须设置为 "1",Jog1 及 Jog2 必须设置为 "0" 在相对定位中, 运行方向由 Positive 及 Negative 决定 通过 ExecuteMode 的上升沿触发定位运动, 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 当目标位置到达后通过 AxisPosOk 及 Done 置 1, 当定位过程中出现错误, 则输出参数 Error 置 1 注意 : 当前正在运行的命令可以通过 ExecuteMode 上升沿被新命令替换, 但仅用于运行模式 ModePos 1,2,3 控制时序示例如图 3-2 所示 图 3-2 相对定位模式控制时序 连续运行模式 (Setup mode) " 连续运行 " 模式允许轴的位置控制器在正向或反向以一个恒定的速度运行, 此为驱动的 "MDI setup" 运行模式 要求 : 运行模式选择 ModePos=3 驱动的运行命令 AxisEnable=1 轴不必回零或编码器未被校正 如果切换模式大于 3, 轴必须为静止状态, 在任意时刻可以在 MDI 运行模式内进行切换 (ModePos=1,2,3) 步骤 : 通过输入参数 Velocity 指定运行速度 通过输入参数 OverV OverAcc OverDec 指定速度 加减速度的倍率 运行条件 "CancelTransing" 及 "IntermediateStop" 必须设置为 "1",Jog1 及 Jog2 必须设置为 "0" Unrestricted 10
11 运行方向由 Positive 及 Negative 决定 通过 ExecuteMode 的上升沿触发定位运动, 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 通过当目标位置到达后通过 AxisPosOk 及 Done 置 1, 当定位过程中出现错误, 则输出参数 Error 置 1 注意 : 当前正在运行的命令可以通过 ExecuteMode 上升沿被新命令替换, 但仅用于运行模式 ModePos 1,2,3 控制时序示例如图 3-3 所示 回零 图 3-3 连续运行模式控制时序 此功能允许轴按照预设的回零速度及方式沿着正向或反向进行回零操作, 激活驱动的主动回零 要求 : 运行模式选择 ModePos=4 驱动的运行命令 EnableAxis=1 回零开关的状态由 FB284 功能块的输入管脚 ConfigEPos.%X11(POS_STW2.2 ) 传递给 V90 PN 轴静止步骤 : 通过输入参数 OverV OverAcc OverDec 指定速度 加减速度的倍率 运行条件 "CancelTransing" 及 "IntermediateStop" 必须设置为 "1",Jog1 及 Jog2 必须设置为 "0" 运行方向由 Positive 及 Negative 决定 通过 ExecuteMode 的上升沿触发回零运动, 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 通过 CancelTransing 信号来终止运动或找到零点开关时 Done 置 1, 当运行过程中出现错误, 则输出参数 Error 置 1 控制时序示例如图 3-4 所示 : Unrestricted 11
12 图 3-4 回零控制时序 设置零点位置 此运行模式允许轴在任意位置时对轴进行零点位置设置 要求 : 运行模式选择 ModePos=5 轴处于闭环控制, 而且为静止状态步骤 : 轴静止时通过 Execute 的上升沿设置轴的零点位置 注意 : 零点位置可使用参数 P2599 进行设置 控制时序示例如图 3-5 所示 : 图 3-5 设置回零控制时序 运行程序块 此程序块运行模式通过驱动功能 "Traversing blocks" 来实现, 它允许自动创建程序块 运行至档块 设置及复位输出 要求 : 运行模式选择 ModePos=6 驱动的运行命令 AxisEnable=1 轴静止 轴必须已回零或绝对值编码器已校正步骤 : 工作模式 目标位置及动态响应已在 V90 PN 驱动的运行块参数中进行设置, 速度的 OverV 参数对于程序块中的速度设定值进行倍率缩放 运行条件 "CancelTransing" 及 "IntermediateStop" 必须设置为 "1",Jog1 及 Jog2 必须设置为 "0" 程序块号在输入参数 "Position" 中设置, 取值应为 0~ 16 Unrestricted 12
13 运动的方向由与工作模式及程序块中的设置决定, 与 Positive 及 Negative 参数无关, 必须将它们设置为 0 选择程序块号后通过 Execute Mode 的上升沿来触发运行, 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 当到达目标位置 Done 置 1, 当运行过程中出现错误, 则输出参数 Error 置 1 控制时序示例如图 3-6 所示 图 3-6 运行程序块控制时序 点动 (Jog) 注意 : 在运行过程中, 当前的运行命令可以被一个新命令通过 ExecuteMode 进行替代, 但仅限于相同的运行模式下 点动运行模式通过驱动的 "Jog" 功能来实现 要求 : 运行模式选择 ModePos=7 驱动的运行命令 AxisEnable=1 轴静止 轴不必回零或绝对值编码器校正步骤 : 点动速度在 V90 PN 中设置, 速度的 OverV 参数对于点动速度设定值进行倍率缩放 运行条件 "CancelTransing" 及 "IntermediateStop" 与点动运行模式无关, 默认设置为 "1" 注意 : Jog1 及 Jog2 用于控制 EPOS 的点动运行, 运动方向由 V90 PN 驱动中设置的点动速度来决定, 默认设置为 Jog1 = 负向点动速度,Jog2 = 正向点动速度, 与 Positive 及 Negative 参数无关, 默认设置为 0 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 点动结束时 (Jog1 or Jog2 = 0) 轴静止时 "AxisPosOK" 置 1, 当运行过程中出现错误, 则输出参数 Error 置 1 控制时序示例如图 3-7 所示 Unrestricted 13
14 图 3-7 点动控制时序 点动增量 (Jog) 点动增量运行模式通过驱动的 "Jog" 功能来实现 要求 : 运行模式选择 ModePos=8 驱动的运行命令 AxisEnable=1 轴静止 轴不必回零或绝对值编码器校正步骤 : 点动速度在 V90 PN 中设置, 速度的 OverV 参数对于点动速度设定值进行倍率缩放 运行条件 "CancelTransing" 及 "IntermediateStop" 与点动运行模式无关, 默认设置为 "1" 注意 : Jog1 及 Jog2 用于控制 EPOS 的点动运行, 运动方向由 V90 PN 驱动中设置的点动速度来决定, 默认设置为 Jog1 traversing distance, Jog2 traversing distance =1000LU, 与 Positive 及 Negative 参数无关, 默认设置为 0 激活命令的当前状态或通过 EPosZSW1 EPosZSW2 进行监控, 功能块处理命令过程中 Busy 为 1, 点动结束时 (Jog1 or Jog2 = 0) 轴静止时 "AxisPosOK" 置 1, 当运行过程中出现错误, 则输出参数 Error 置 1 控制时序示例如图 3-8 所示 图 3-8 增量点动控制时序 Unrestricted 14

15 运行中回零 (Flying homing) 运行中回零 ( 被动回零 ) 由驱动中的回零功能来实现, 允许轴在运行中回零要求 : 将输入参数 FlyRef 设置为 1 不选择 ModePos 4 ( 回零运行 ) 及 5( 设置回零点 ), 设置令 AxisEnable=1 步骤 : 采用驱动中预设的回零设置, 运行中回零可随时选择或取消 运行条件 "CancelTransing" 及 "IntermediateStop" 与点动运行模式无关, 默认设置为 "1" 当设定回零的快速测量输入到达时, 对当前位置进行回零处理 基于 ModePos 值的运行模式切换说明 图 3-9 显示了基于 ModePos 值的可能的运行模式转换 : 图 3-9 基于 ModePos 值的运行模式转换 4 项目配置 4.1 使用的软 硬件 使用的软件 : (1) TIA Portal V14 (2) V-Assistant V1.05 使用的硬件 : (1)CPU 1215FC DC/DC/DCINAMICS V4.1: 订货号 6ES AF40-0XB0 Unrestricted 15



16 (2)V90 PN 控制器 : 订货号 6SL3210-5FB10-1UF0 (3)1FL6 电机 : 订货号注意 : 使用 V90 的 EPOS 功能, 需要在 Portal V14 中安装 SINAMICS V90 PROFINET GSD 文件, 下载链接如下 : S 项目配置步骤 项目配置步骤如表 4-1 所示 序号 1 创建 S 新项目 : 描述 2 添加 S PLC 设备 : 2 安装 V90 PN 的 GSD 文件 : Unrestricted 16



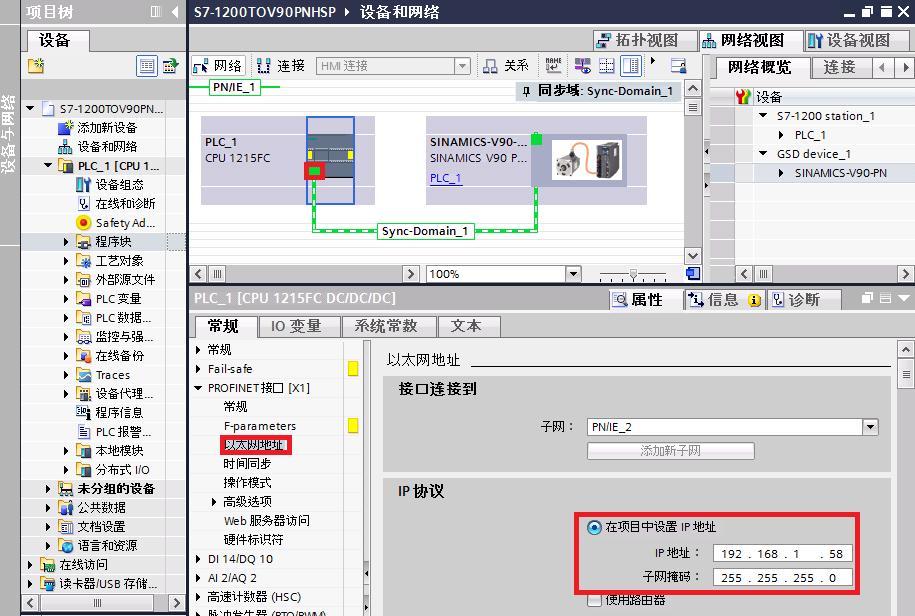
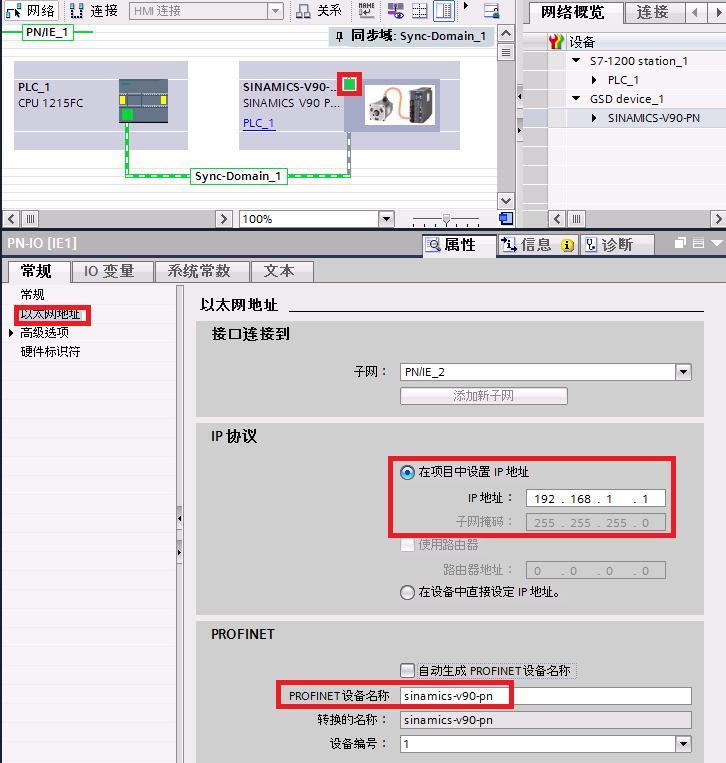
17 2 在网络视图中添加 V90 PN 设备并创建与 PLC 的网络连接 V90 PN 的 GSD 文件在硬件目录中的路径如下 : 注意 : 需选择正确的 GSD 版本, 如图中所示 5 分别设置 S 及 V90 PN 的 IP 地址及 Device name: Unrestricted 17
18 6 在 V90 的设备视图中插入西门子报文 111: Unrestricted 18

")

19 8 编译项目正确后, 下载 S 的项目配置 : 9 在 OB1 中将指令库中下述路径中的 SINA_POS(FB284) 功能块拖曳到编程网络中 : 10 为功能块各管脚添加变量 : Unrestricted 19

20 注意 : 功能块管脚 HWI DSTW 及 HWI DSZW 的赋值请参看下图 : Unrestricted 20


21 或者, 点击 HWI DSTW 管脚, 进行选择, 如图所 11 将变量表中的相关变量添加到 Watch table 中, 并通过 Watch table 进行控制测试 : 表 4-1 S 项目配置步骤 4.3 V90 PN 项目配置步骤 项目配置步骤如表 4-2 所示 序号描述 1 设置控制模式为 基本位置控制 (EPOS) : 2 配置通信报文为西门子标准报文 111: 3 为 V90 设置设备名称 : 表 4-2 V90 PN 项目配置步骤 Unrestricted 21
目录 1 概述 SINA_POS(FB284) 功能块管脚介绍 SINA_POS 功能块的功能实现 概述 SINA_POS(FB284) 运行模式 运行条件 绝对定位运行模式
 功能块管脚介绍 SINA_POS 功能块的功能实现 概述 SINA_POS(FB284) 运行模式 运行条件 绝对定位运行模式") 常问问题 11/2016 S7-1500 通过 FB284 实现 V90PN 的 EPOS 控制 S7-1500 V90PN FB284 EPOS https://support.industry.siemens.com/cs/cn/zh/view/109742968 Unrestricted 目录 1 概述... 3 2 SINA_POS(FB284) 功能块管脚介绍... 4 3 SINA_POS
常问问题 11/2016 S7-1500 通过 FB284 实现 V90PN 的 EPOS 控制 S7-1500 V90PN FB284 EPOS https://support.industry.siemens.com/cs/cn/zh/view/109742968 Unrestricted 目录 1 概述... 3 2 SINA_POS(FB284) 功能块管脚介绍... 4 3 SINA_POS
操作指南 08 月 /2016 CU250X-2 EPOS 功能入门指南 第九部分使用 TIA PORTAL 库 程序 SINA_POS(FB284) 基于 111 报文的定位功能 G120, CU250S-2, CU250D-2, EPOS, 基本定位, TIA PORTAL, SINA_POS,
 基于 111 报文的定位功能 G120, CU250S-2, CU250D-2, EPOS, 基本定位, TIA PORTAL, SINA_POS,") 操作指南 08 月 /2016 CU250X-2 EPOS 功能入门指南 第九部分使用 TIA PORTAL 库 程序 SINA_POS(FB284) 基于 111 报文的定位功能 G120, CU250S-2, CU250D-2, EPOS, 基本定位, TIA PORTAL, SINA_POS, FB284, 111 报文 https://support.industry.siemens.com/cs/cn/zh/view/109740253
操作指南 08 月 /2016 CU250X-2 EPOS 功能入门指南 第九部分使用 TIA PORTAL 库 程序 SINA_POS(FB284) 基于 111 报文的定位功能 G120, CU250S-2, CU250D-2, EPOS, 基本定位, TIA PORTAL, SINA_POS, FB284, 111 报文 https://support.industry.siemens.com/cs/cn/zh/view/109740253
操作指南 07/2015 屏与 G120 CU250S-2 PN 通讯 屏,KTP900,G120,CU250-2 PN, PROFINET, 通讯 Unrestricted
 操作指南 07/2015 屏与 G120 CU250S-2 PN 通讯 屏,KTP900,G120,CU250-2 PN, PROFINET, 通讯 https://support.industry.siemens.com/cs/cn/zh/view/109478306 Unrestricted 目录 1 概述... 3 2 触摸屏与 G120 CU250S-2 PN 通讯示例... 4 2.1 软硬件配置...
操作指南 07/2015 屏与 G120 CU250S-2 PN 通讯 屏,KTP900,G120,CU250-2 PN, PROFINET, 通讯 https://support.industry.siemens.com/cs/cn/zh/view/109478306 Unrestricted 目录 1 概述... 3 2 触摸屏与 G120 CU250S-2 PN 通讯示例... 4 2.1 软硬件配置...
SINAMICS G120 基本定位器
 基 本 安 全 说 明 1 引 言 2 SINAMICS SINAMICS G120 3 A 附 录 功 能 手 册 04/2014, FW V4.7 A5E34257659C AA 法 律 资 讯 警 告 提 示 系 统 为 了 您 的 人 身 安 全 以 及 避 免 财 产 损 失, 必 须 注 意 本 手 册 中 的 提 示 人 身 安 全 的 提 示 用 一 个 警 告 三 角 表 示, 仅
基 本 安 全 说 明 1 引 言 2 SINAMICS SINAMICS G120 3 A 附 录 功 能 手 册 04/2014, FW V4.7 A5E34257659C AA 法 律 资 讯 警 告 提 示 系 统 为 了 您 的 人 身 安 全 以 及 避 免 财 产 损 失, 必 须 注 意 本 手 册 中 的 提 示 人 身 安 全 的 提 示 用 一 个 警 告 三 角 表 示, 仅
Microsoft Word - EP3E PROFINET伺服驱动器与S7-200 SMART的连接.docx
 文件密级 : 外部公开 www.maxsine.com 伺服系统成套服务商 工程技术笔记 EP3E PROFINET 伺服驱动器与 S7200 SMART 的连接 关键词 :EP3EPROFINET 伺服驱动器,S7200 SMART 20190505 武汉迈信电气技术有限公司 修订记录 变更更内容 : 20190505 创建本文档 编制 : 隗梦琪 审核 : 陈毅 2019 年 5 月 5 日 2019
文件密级 : 外部公开 www.maxsine.com 伺服系统成套服务商 工程技术笔记 EP3E PROFINET 伺服驱动器与 S7200 SMART 的连接 关键词 :EP3EPROFINET 伺服驱动器,S7200 SMART 20190505 武汉迈信电气技术有限公司 修订记录 变更更内容 : 20190505 创建本文档 编制 : 隗梦琪 审核 : 陈毅 2019 年 5 月 5 日 2019
燃烧器电子控制系统 目录 2
 聚焦 REC27 燃烧器电子控制系统 燃烧器电子控制系统 目录 2 REC27 燃烧器电子控制系统 2 概述 燃烧器电子控制系统 2 2 2 2 2 A B1 B2 C D E 22 2 2 系统图示 2 2 2 2 2 2 主要特征及优点 燃烧器电子控制系统 2 2 集成控制 2 2 节能 安全运行 运行模式 远程锁定复位 可根据需求提供特殊机型 无接合间隙及机械迟滞 简单的试运行及燃烧器设定 2
聚焦 REC27 燃烧器电子控制系统 燃烧器电子控制系统 目录 2 REC27 燃烧器电子控制系统 2 概述 燃烧器电子控制系统 2 2 2 2 2 A B1 B2 C D E 22 2 2 系统图示 2 2 2 2 2 2 主要特征及优点 燃烧器电子控制系统 2 2 集成控制 2 2 节能 安全运行 运行模式 远程锁定复位 可根据需求提供特殊机型 无接合间隙及机械迟滞 简单的试运行及燃烧器设定 2
操作指南 04/2015 S 与 G150 CU320-2 PN 的 PROFINET 通信第 1 部分控制变频器起停及调速 S7-1500,G150,CU320-2 PN, PROFINET 通信, 起停, 调速
 操作指南 04/015 S7-1500 与 G150 CU30- PN 的 PROFINET 通信第 1 部分控制变频器起停及调速 S7-1500,G150,CU30- PN, PROFINET 通信, 起停, 调速 https://support.industry.siemens.com/cs/cn/zh/view/1094775 目录 1. G150 PROFINET 通信功能概述... 3.
操作指南 04/015 S7-1500 与 G150 CU30- PN 的 PROFINET 通信第 1 部分控制变频器起停及调速 S7-1500,G150,CU30- PN, PROFINET 通信, 起停, 调速 https://support.industry.siemens.com/cs/cn/zh/view/1094775 目录 1. G150 PROFINET 通信功能概述... 3.
Error! Use the Home tab to apply Blocktext to the text that you want to appear here. Error! Use the Home tab to apply Blocktext to the text that you w
 操作指南 10/2016 S7-1200 通过 PROFINET 连接 SINAMICS V90 PN 实现位置闭环控制 S7-1200 PROFINET SINAMICS V90 位置反馈 闭环 https://support.industry.siemens.com/cs/cn/zh/view/ 109742662 Unrestricted Error! Use the Home tab to
操作指南 10/2016 S7-1200 通过 PROFINET 连接 SINAMICS V90 PN 实现位置闭环控制 S7-1200 PROFINET SINAMICS V90 位置反馈 闭环 https://support.industry.siemens.com/cs/cn/zh/view/ 109742662 Unrestricted Error! Use the Home tab to
SINAMICS G120 siemens.com/sinamics-g120 Answers for industry.
 SINAMICS G120 siemens.com/sinamics-g120 Answers for industry. SINAMICS G120 SINAMICS G120 SINAMICS G120 (CU) 0.37 kw 250kW (PM) G120 I/O (EPos) STO SS1 SBC SLS SDI SSM PROFINET PROFIBUS PROFIdrive PROFIsafe
SINAMICS G120 siemens.com/sinamics-g120 Answers for industry. SINAMICS G120 SINAMICS G120 SINAMICS G120 (CU) 0.37 kw 250kW (PM) G120 I/O (EPos) STO SS1 SBC SLS SDI SSM PROFINET PROFIBUS PROFIdrive PROFIsafe
操作指南 6 月 /2016 CU250X-2 EPOS 功能入门指南第十部分使用 STEP 7 库程序 FB283 基于 111 报文的定位功能 G120,CU250S-2,CU250D-2,EPOS, 基本定位,FB283,111 报文
 操作指南 6 月 /2016 CU250X-2 EPOS 功能入门指南第十部分使用 STEP 7 库程序 FB283 基于 111 报文的定位功能 G120,CU250S-2,CU250D-2,EPOS, 基本定位,FB283,111 报文 https://support.industry.siemens.com/cs/cn/zh/view/109739272 目录 1 关于入门指南... 3 2
操作指南 6 月 /2016 CU250X-2 EPOS 功能入门指南第十部分使用 STEP 7 库程序 FB283 基于 111 报文的定位功能 G120,CU250S-2,CU250D-2,EPOS, 基本定位,FB283,111 报文 https://support.industry.siemens.com/cs/cn/zh/view/109739272 目录 1 关于入门指南... 3 2
Application description
 常问问题 07/2018 在 TIA 环境下实现 S7-1500F 和 S7-1200F 之间的安全相关控制器与智能设备通讯 ( 不同项目 ) SAFETY https://support.industry.siemens.com/cs/cn/zh/view/109758604 目录 1 概念... 3 2 安全相关的 PN 控制器和智能设备之间的通信... 3 2.1 示例所使用的软硬件环境...
常问问题 07/2018 在 TIA 环境下实现 S7-1500F 和 S7-1200F 之间的安全相关控制器与智能设备通讯 ( 不同项目 ) SAFETY https://support.industry.siemens.com/cs/cn/zh/view/109758604 目录 1 概念... 3 2 安全相关的 PN 控制器和智能设备之间的通信... 3 2.1 示例所使用的软硬件环境...
顺企网产品详情
 西门子数控操作面板 产品名称 西门子数控操作面板 生产厂家 上海西万科技有限公司 价格 1.00/1 规格参数 西门子数控操作面板 : 西门子数控操作面板 型号西门子数控操作面板 : 西门子数控操作面 板 西门子数控操作面板 : 西门子数控操作面 板 公司地址 枫兰路 128 号 联系电话 02131661773&1820192837 产品详情 西门子数控操作面板 西门子数控操作面板 西门子数控操作面板
西门子数控操作面板 产品名称 西门子数控操作面板 生产厂家 上海西万科技有限公司 价格 1.00/1 规格参数 西门子数控操作面板 : 西门子数控操作面板 型号西门子数控操作面板 : 西门子数控操作面 板 西门子数控操作面板 : 西门子数控操作面 板 公司地址 枫兰路 128 号 联系电话 02131661773&1820192837 产品详情 西门子数控操作面板 西门子数控操作面板 西门子数控操作面板
目录 1 概念 安全相关的 DP 主站之间的通信 示例所使用的软硬件环境 硬件配置 通讯编程
 常问问题 6/2017 在 TIA 环境下实现 S7-1200F 和 1500F 使用 DP/DP Couple 的安全相关主站与主站通讯 SAFETY https://support.industry.siemens.com/cs/cn/zh/view/109748438 目录 1 概念... 3 2 安全相关的 DP 主站之间的通信... 3 2.1 示例所使用的软硬件环境... 3 2.2 硬件配置...
常问问题 6/2017 在 TIA 环境下实现 S7-1200F 和 1500F 使用 DP/DP Couple 的安全相关主站与主站通讯 SAFETY https://support.industry.siemens.com/cs/cn/zh/view/109748438 目录 1 概念... 3 2 安全相关的 DP 主站之间的通信... 3 2.1 示例所使用的软硬件环境... 3 2.2 硬件配置...
 SMART INVERTER, SMART CHOICE www.siemens.com.cn/v20 0.12 kw ~ 15 kw USS MODBUS RTU 7.5 kw ~ 15 kw PCB V/fV 2 /f 0.12 kw ~ 15 kw 1AC 200 V... 240 V ( -10 % / +10 % ) 3AC 380 V... 480 V ( -15 % / +10 % )
SMART INVERTER, SMART CHOICE www.siemens.com.cn/v20 0.12 kw ~ 15 kw USS MODBUS RTU 7.5 kw ~ 15 kw PCB V/fV 2 /f 0.12 kw ~ 15 kw 1AC 200 V... 240 V ( -10 % / +10 % ) 3AC 380 V... 480 V ( -15 % / +10 % )
S7-1200 可编程控制器
 www.plcworld.cn 前 言 SIMATIC S7 系 统 手 册 产 品 概 述 1 安 装 2 PLC 概 念 3 设 备 配 置 4 编 程 概 念 5 编 写 指 令 6 PROFINET 7 点 对 点 (PtP) 通 信 8 在 线 和 诊 断 工 具 9 A 技 术 规 范 B 计 算 功 率 预 算 C 订 货 号 11/2009 A5E02486685-02 法 律 资
www.plcworld.cn 前 言 SIMATIC S7 系 统 手 册 产 品 概 述 1 安 装 2 PLC 概 念 3 设 备 配 置 4 编 程 概 念 5 编 写 指 令 6 PROFINET 7 点 对 点 (PtP) 通 信 8 在 线 和 诊 断 工 具 9 A 技 术 规 范 B 计 算 功 率 预 算 C 订 货 号 11/2009 A5E02486685-02 法 律 资
常问问题 05/2018 S7-1500T 连接 S210 实现运动控制的项目示例 S7-1500T SINAMICS S210 Unrestricted
 常问问题 05/2018 S7-1500T 连接 S210 实现运动控制的项目示例 S7-1500T SINAMICS S210 http://support.automation.siemens.com/cn/view/zh/109757514 Unrestricted 目录 1 概述 3 2 项目准备... 3 2.1 实例的项目总览... 3 2.2 使用的软硬件... 4 3 项目配置...
常问问题 05/2018 S7-1500T 连接 S210 实现运动控制的项目示例 S7-1500T SINAMICS S210 http://support.automation.siemens.com/cn/view/zh/109757514 Unrestricted 目录 1 概述 3 2 项目准备... 3 2.1 实例的项目总览... 3 2.2 使用的软硬件... 4 3 项目配置...

activePDF WebGrabber
 S7-1200 与 S7-300 CPU 集成 PN 口的 ISO on TCP 通信条目号 :79610922 日期 :2013-09-10 S7-1200 与 S7-300 CPU 集成 PN 口的 ISO on TCP 通信 1 概述 S7-1200 与 S7-300 之间的以太网通信方式比较多, 可以采用 ISO on TCP TCP 和 S7 的方式进行通信 在 S7-1200 CPU 中采用
S7-1200 与 S7-300 CPU 集成 PN 口的 ISO on TCP 通信条目号 :79610922 日期 :2013-09-10 S7-1200 与 S7-300 CPU 集成 PN 口的 ISO on TCP 通信 1 概述 S7-1200 与 S7-300 之间的以太网通信方式比较多, 可以采用 ISO on TCP TCP 和 S7 的方式进行通信 在 S7-1200 CPU 中采用
Microsoft Word - Delta Controller ASCII_RTU_SC
 Delta Controller ASCII/RTU ( 适用台达变频器 伺服驱动器 PLC 温度控制器 ) 人机默认值通讯速率 :9600, 7, None, 2 (ASCII); 9600, 8, None, 2 (RTU) 控制器站号 :1 控制区 / 状态区 :None/None 控制器接线的说明 Delta Servo a. RS-232(DOP-A/AE/AS, DOP-B 系列适用 )
Delta Controller ASCII/RTU ( 适用台达变频器 伺服驱动器 PLC 温度控制器 ) 人机默认值通讯速率 :9600, 7, None, 2 (ASCII); 9600, 8, None, 2 (RTU) 控制器站号 :1 控制区 / 状态区 :None/None 控制器接线的说明 Delta Servo a. RS-232(DOP-A/AE/AS, DOP-B 系列适用 )
电机与电器专业人才培养方案实施保障.doc
 国 家 示 范 性 高 等 职 业 院 校 建 设 项 目 电 机 与 电 器 专 业 人 才 培 养 方 案 施 保 障 二 〇 一 〇 年 三 月 目 录 一 建 设 训 习 基 地...1 ( 一 ) 校 内 训 条 件 建 设...1 ( 二 ) 校 外 训 习 条 件 建 设...2 二 构 建 双 师 结 构 教 师 团 队...3 ( 一 ) 制 度 保 障...3 ( 二 ) 师 资
国 家 示 范 性 高 等 职 业 院 校 建 设 项 目 电 机 与 电 器 专 业 人 才 培 养 方 案 施 保 障 二 〇 一 〇 年 三 月 目 录 一 建 设 训 习 基 地...1 ( 一 ) 校 内 训 条 件 建 设...1 ( 二 ) 校 外 训 习 条 件 建 设...2 二 构 建 双 师 结 构 教 师 团 队...3 ( 一 ) 制 度 保 障...3 ( 二 ) 师 资
untitled
 1 081804K 2 3 1 2 3 4 5 6 7 8 9 1 10 11 4 5 6 4 170 29 39.5 55 34.5, 12 7 2 129 1 2 1 2 1 2 1 2 511000011 y 2 32 2 011010021 y 2 32 2 511000021 y 2 32 2 511000031 y 2 32 2 541160111 1 y 3 48 3 541160211
1 081804K 2 3 1 2 3 4 5 6 7 8 9 1 10 11 4 5 6 4 170 29 39.5 55 34.5, 12 7 2 129 1 2 1 2 1 2 1 2 511000011 y 2 32 2 011010021 y 2 32 2 511000021 y 2 32 2 511000031 y 2 32 2 541160111 1 y 3 48 3 541160211
activePDF WebGrabber
 如何编程通信程通信块 FB63 "TSEND", FB64 "TRCV", FB65 "TCON" 和 FB66 "TDISCON" 以实现实现用 S7-300 或 S7-400 CPU 的 PROFINET 口进行基于 TCP 协议的数据交据交换? 条目号 :29737950 日期 :2012-05-03 S7-400 CPU 41x -- 通信组态和编程 -- 使用 S7 通信块 ET 200S
如何编程通信程通信块 FB63 "TSEND", FB64 "TRCV", FB65 "TCON" 和 FB66 "TDISCON" 以实现实现用 S7-300 或 S7-400 CPU 的 PROFINET 口进行基于 TCP 协议的数据交据交换? 条目号 :29737950 日期 :2012-05-03 S7-400 CPU 41x -- 通信组态和编程 -- 使用 S7 通信块 ET 200S
操作指南 2/2018 如何实现 400H 与 S 之间 的 S7 通讯 Unrestricted
 操作指南 2/2018 如何实现 400H 与 S7-1500 之间 的 S7 通讯 https://support.industry.siemens.com/cs/cn/zh/view/109756733 Unrestricted 目录 1 工业库简介... 1 2 400H 与 S7-1500 通讯方案... 2 3 400H 与 S7-1500 通讯组态... 5 3.1 S7-1500 通讯组态...
操作指南 2/2018 如何实现 400H 与 S7-1500 之间 的 S7 通讯 https://support.industry.siemens.com/cs/cn/zh/view/109756733 Unrestricted 目录 1 工业库简介... 1 2 400H 与 S7-1500 通讯方案... 2 3 400H 与 S7-1500 通讯组态... 5 3.1 S7-1500 通讯组态...
目录 1 SIMOTION 和 SCOUT TIA 概述 软 硬件环境 组态与调试前准备 SIMOTION 项目的创建及组态 SIMOTION 项目调试 Unrestricted 2
 快速入门 11/2017 通过 SCOUT TIA 实现 SMOTION 的组态和基本调试 http://support.automation.siemens.com/cn/view/zh/ 109752991 Unrestricted 目录 1 SIMOTION 和 SCOUT TIA 概述... 3 2 软 硬件环境... 3 3 组态与调试前准备... 3 4 SIMOTION 项目的创建及组态...
快速入门 11/2017 通过 SCOUT TIA 实现 SMOTION 的组态和基本调试 http://support.automation.siemens.com/cn/view/zh/ 109752991 Unrestricted 目录 1 SIMOTION 和 SCOUT TIA 概述... 3 2 软 硬件环境... 3 3 组态与调试前准备... 3 4 SIMOTION 项目的创建及组态...
一 登录 crm Mobile 系统 : 输入 ShijiCare 用户名和密码, 登录系统, 如图所示 : 第 2 页共 32 页
 第 1 页共 32 页 crm Mobile V1.0 for IOS 用户手册 一 登录 crm Mobile 系统 : 输入 ShijiCare 用户名和密码, 登录系统, 如图所示 : 第 2 页共 32 页 二 crm Mobile 界面介绍 : 第 3 页共 32 页 三 新建 (New) 功能使用说明 1 选择产品 第 4 页共 32 页 2 填写问题的简要描述和详细描述 第 5 页共
第 1 页共 32 页 crm Mobile V1.0 for IOS 用户手册 一 登录 crm Mobile 系统 : 输入 ShijiCare 用户名和密码, 登录系统, 如图所示 : 第 2 页共 32 页 二 crm Mobile 界面介绍 : 第 3 页共 32 页 三 新建 (New) 功能使用说明 1 选择产品 第 4 页共 32 页 2 填写问题的简要描述和详细描述 第 5 页共
Application description
 PROFINET SIMATIC PCS 7 SIMATIC PCS 7 2013 10 Answers for industry. 2013 Produkthaftungsgesetz wesentliche Vertragspflichten ID 50203404 http://support.automation.siemens.com/ww/view/en/50203404 http://support.automation.siemens.com/ww/view/en/72887082
PROFINET SIMATIC PCS 7 SIMATIC PCS 7 2013 10 Answers for industry. 2013 Produkthaftungsgesetz wesentliche Vertragspflichten ID 50203404 http://support.automation.siemens.com/ww/view/en/50203404 http://support.automation.siemens.com/ww/view/en/72887082
<4D6963726F736F667420576F7264202D20D1A7C9FACAD6B2E1B8C4D7EED6D5A3A8B4F8B1EDB8F1BCD3D2B3C2EBB0E6A3A9372E3239>
 北 京 科 技 大 学 学 生 手 册 ( 本 科 生 ) 学 生 工 作 部 ( 处 ) 二 〇 一 五 年 七 月 北 京 科 技 大 学 学 生 手 册 ( 本 科 生 ) 编 委 会 主 编 于 成 文 盛 佳 伟 编 委 ( 按 姓 氏 笔 画 排 序 ) 丁 煦 生 尹 兆 华 龙 洋 史 立 伟 曲 涛 刘 晓 东 杜 振 民 杨 雄 何 进 宋 波 张 卫 冬 张 卫 钢 张 文
北 京 科 技 大 学 学 生 手 册 ( 本 科 生 ) 学 生 工 作 部 ( 处 ) 二 〇 一 五 年 七 月 北 京 科 技 大 学 学 生 手 册 ( 本 科 生 ) 编 委 会 主 编 于 成 文 盛 佳 伟 编 委 ( 按 姓 氏 笔 画 排 序 ) 丁 煦 生 尹 兆 华 龙 洋 史 立 伟 曲 涛 刘 晓 东 杜 振 民 杨 雄 何 进 宋 波 张 卫 冬 张 卫 钢 张 文
桂林市劳动和社会保障局关于
 桂 林 市 人 力 资 源 和 社 会 保 障 局 文 件 市 人 社 发 2012 60 号 桂 林 市 人 力 资 源 和 社 会 保 障 局 关 于 2012 年 秘 书 等 十 八 个 职 业 国 家 职 业 资 格 全 国 全 区 统 一 考 试 有 关 问 题 的 通 知 各 有 关 单 位 : 根 据 自 治 区 人 力 资 源 和 社 会 保 障 厅 关 于 做 好 2012 年 国
桂 林 市 人 力 资 源 和 社 会 保 障 局 文 件 市 人 社 发 2012 60 号 桂 林 市 人 力 资 源 和 社 会 保 障 局 关 于 2012 年 秘 书 等 十 八 个 职 业 国 家 职 业 资 格 全 国 全 区 统 一 考 试 有 关 问 题 的 通 知 各 有 关 单 位 : 根 据 自 治 区 人 力 资 源 和 社 会 保 障 厅 关 于 做 好 2012 年 国

Microsoft Word 年度选拔硕博连读研究生的通知.doc
 南 工 (2015) 研 字 第 3 号 关 于 选 拔 2015 年 度 硕 博 连 读 研 究 生 的 通 知 各 有 关 学 院 : 为 适 应 我 国 构 建 社 会 主 义 和 谐 社 会 和 建 设 创 新 型 国 家 的 战 略 需 要, 加 快 拔 尖 创 新 人 才 的 培 养, 我 校 决 定 继 续 推 荐 和 选 拔 一 批 基 本 素 质 好 业 务 基 础 强 品 学 兼
南 工 (2015) 研 字 第 3 号 关 于 选 拔 2015 年 度 硕 博 连 读 研 究 生 的 通 知 各 有 关 学 院 : 为 适 应 我 国 构 建 社 会 主 义 和 谐 社 会 和 建 设 创 新 型 国 家 的 战 略 需 要, 加 快 拔 尖 创 新 人 才 的 培 养, 我 校 决 定 继 续 推 荐 和 选 拔 一 批 基 本 素 质 好 业 务 基 础 强 品 学 兼
OB1
 SIMATIC 克索稳定杆淬火机 20150813\ 2018-06-14 09:29: 30 OB1 - < 离线 > Cycle Execution 名称 : 系列 : 作者 : 版本 : 0.1 块版本 : 2 时间标志代码 : 2018-02-10 14:06:32 接口 : 1996-02-15 16:51:12 长度 ( 块 / 逻辑 / 数据 ): 11154 10520 00030
SIMATIC 克索稳定杆淬火机 20150813\ 2018-06-14 09:29: 30 OB1 - < 离线 > Cycle Execution 名称 : 系列 : 作者 : 版本 : 0.1 块版本 : 2 时间标志代码 : 2018-02-10 14:06:32 接口 : 1996-02-15 16:51:12 长度 ( 块 / 逻辑 / 数据 ): 11154 10520 00030
HMI COM1 RS SIEMENSE S7-200 RS485
 目录 第一部分维控人机界面串口引脚定义...2 1 LEVI777T COM1 引脚定义原理图...2 2 LEVI777T COM2 引脚定义原理图...2 3 LEVI908T COM1 引脚定义原理图...2 4 LEVI908T COM2/COM3 引脚定义原理图...3 第二部分通信针头...4 1 通信针头...4 第三部分各 PLC 与 LEVI 通信线接法...5 1 西门子 S7-200
目录 第一部分维控人机界面串口引脚定义...2 1 LEVI777T COM1 引脚定义原理图...2 2 LEVI777T COM2 引脚定义原理图...2 3 LEVI908T COM1 引脚定义原理图...2 4 LEVI908T COM2/COM3 引脚定义原理图...3 第二部分通信针头...4 1 通信针头...4 第三部分各 PLC 与 LEVI 通信线接法...5 1 西门子 S7-200
S7-300 和 S7-400 集成 PN 口的 S7 通信 S7 Communication with S7-300/400 Integrated PN Port Getting Started Getting-Started Edition (2009 年 4 月 )
") S7-300 和 S7-400 集成 PN 口的 S7 通信 S7 Communication with S7-300/400 Integrated PN Port Getting Started Getting-Started Edition (2009 年 4 月 ) 摘要 本文对 S7-300 和 S7400 集成 PN 口的 S7 通信做了基本介绍, 对其配置步骤以及 编程方法作了完整的描述
S7-300 和 S7-400 集成 PN 口的 S7 通信 S7 Communication with S7-300/400 Integrated PN Port Getting Started Getting-Started Edition (2009 年 4 月 ) 摘要 本文对 S7-300 和 S7400 集成 PN 口的 S7 通信做了基本介绍, 对其配置步骤以及 编程方法作了完整的描述
通过 PROFINET 网络实现 SINAMICS 120 的 PN IO OPC 通讯 SINAMICS S120 PN IO OPC Communication with PROFINET Network Getting Started Edition (2012 年 11 月 )
") 通过 PROFINET 网络实现 SINAMICS 120 的 PN IO OPC 通讯 SINAMICS S120 PN IO OPC Communication with PROFINET Network Getting Started Edition (2012 年 11 月 ) 摘要本文介绍了如何通过 PROFINET 网络实现 SINAMICS S120 的 OPC 通讯 关键词 SINAMICS
通过 PROFINET 网络实现 SINAMICS 120 的 PN IO OPC 通讯 SINAMICS S120 PN IO OPC Communication with PROFINET Network Getting Started Edition (2012 年 11 月 ) 摘要本文介绍了如何通过 PROFINET 网络实现 SINAMICS S120 的 OPC 通讯 关键词 SINAMICS
untitled
 ...... SINAMICS Drives Answers for industry. 2 SINAMICS G110 SINAMICS G120 SINAMICS G120D SINAMICS G130/G150 SINAMICS S120 SINAMICS S150 SINAMICS GM150/SM150/GL150 V/f V/f V/f V/f 0.12~3kW (0.16~4HP) 0.37~90kW
...... SINAMICS Drives Answers for industry. 2 SINAMICS G110 SINAMICS G120 SINAMICS G120D SINAMICS G130/G150 SINAMICS S120 SINAMICS S150 SINAMICS GM150/SM150/GL150 V/f V/f V/f V/f 0.12~3kW (0.16~4HP) 0.37~90kW


团 学 要 闻 我 校 召 开 共 青 团 五 届 九 次 全 委 ( 扩 大 ) 会 议 3 月 17 日, 我 校 共 青 团 五 届 九 次 全 委 ( 扩 大 ) 会 议 在 行 政 办 公 楼 五 楼 会 议 室 举 行, 校 团 委 委 员 各 院 ( 系 ) 团 委 书 记 校 学 生
 会 议 3 月 17 日, 我 校 共 青 团 五 届 九 次 全 委 ( 扩 大 ) 会 议 在 行 政 办 公 楼 五 楼 会 议 室 举 行, 校 团 委 委 员 各 院 ( 系 ) 团 委 书 记 校 学 生") 共 青 团 工 作 简 报 2011 年 第 1 期 共 青 团 大 连 海 洋 大 学 委 员 会 团 学 要 闻 : 导 读 我 校 召 开 共 青 团 五 届 九 次 全 委 ( 扩 大 ) 会 议 我 校 在 大 连 市 大 学 生 创 新 创 意 作 品 大 赛 中 取 得 佳 绩 校 团 委 召 开 学 生 干 部 思 想 动 态 座 谈 会 校 团 委 组 织 开 展 弘 扬 雷 锋
共 青 团 工 作 简 报 2011 年 第 1 期 共 青 团 大 连 海 洋 大 学 委 员 会 团 学 要 闻 : 导 读 我 校 召 开 共 青 团 五 届 九 次 全 委 ( 扩 大 ) 会 议 我 校 在 大 连 市 大 学 生 创 新 创 意 作 品 大 赛 中 取 得 佳 绩 校 团 委 召 开 学 生 干 部 思 想 动 态 座 谈 会 校 团 委 组 织 开 展 弘 扬 雷 锋
<4D F736F F D20B6A8CEBBC4A3B0E5464D BFECCBD9CAB9D3C3C8EBC3C52E646F63>
 定位模板 FM 354 快速使用入门 V1.0 April 2005 编者注 : 该文档主要面对初次使用定位模板 FM 354 的用户 内容包括一些调试的步骤, 使用经验, 等等 但是, 该文档无法取代 Manual FM354 建议: 用户通过此文档掌握了初步调试和使用模板的方法以后, 一定需要认真 仔细阅读 Manual FM354, 进一步加深对定位模板 FM 354 的理解 该文档, 希望对初次使用定位模板
定位模板 FM 354 快速使用入门 V1.0 April 2005 编者注 : 该文档主要面对初次使用定位模板 FM 354 的用户 内容包括一些调试的步骤, 使用经验, 等等 但是, 该文档无法取代 Manual FM354 建议: 用户通过此文档掌握了初步调试和使用模板的方法以后, 一定需要认真 仔细阅读 Manual FM354, 进一步加深对定位模板 FM 354 的理解 该文档, 希望对初次使用定位模板
上海地区进出口饲料和饲料添加剂经营单位备案名单
 上 海 口 岸 进 出 口 饲 料 经 营 企 业 备 案 名 单 ( 更 新 日 期 2015-03-13) 序 号 310-SL-0001 310-SL-0002 310-SL-0003 310-SL-0004 310-SL-0005 310-SL-0006 310-SL-0007 310-SL-0008 310-SL-0009 310-SL-0010 310-SL-0011 310-SL-0012
上 海 口 岸 进 出 口 饲 料 经 营 企 业 备 案 名 单 ( 更 新 日 期 2015-03-13) 序 号 310-SL-0001 310-SL-0002 310-SL-0003 310-SL-0004 310-SL-0005 310-SL-0006 310-SL-0007 310-SL-0008 310-SL-0009 310-SL-0010 310-SL-0011 310-SL-0012
中国证券监督管理委员会公告
 201523 : 1. 1 120 1 200 / 1 APP 2 / 2 8 4 30% 3 APP APP 80% 120 / 4 2 5 2. 2 5 1 1 APP 1.2 / 0.8 / IP 0.4 / 2 0.8G 1%/ 3 2017 3 1 2017 3 31 23 1. WORD, 2 2. PDF 3., WORD PDF 4. 2016 WORD PDF 5. 2016 1
201523 : 1. 1 120 1 200 / 1 APP 2 / 2 8 4 30% 3 APP APP 80% 120 / 4 2 5 2. 2 5 1 1 APP 1.2 / 0.8 / IP 0.4 / 2 0.8G 1%/ 3 2017 3 1 2017 3 31 23 1. WORD, 2 2. PDF 3., WORD PDF 4. 2016 WORD PDF 5. 2016 1
Application description
 常问问题 05/2014 WinCC V7.2 与 S7-1200/1500 PLC 常规通讯 WinCC V7.2 S7-1200 S7-1500 http://support.automation.siemens.com/cn/view/zh/92378435 目录 1 概述... 3 2 WinCC V7.2 与 S7-1200 PLC 常规通讯... 3 2.1 设置 PLC 通讯参数...
常问问题 05/2014 WinCC V7.2 与 S7-1200/1500 PLC 常规通讯 WinCC V7.2 S7-1200 S7-1500 http://support.automation.siemens.com/cn/view/zh/92378435 目录 1 概述... 3 2 WinCC V7.2 与 S7-1200 PLC 常规通讯... 3 2.1 设置 PLC 通讯参数...
FM 353/FM 354 快速入门
 定位模板 FM 354 快速使用入门 FM354 Getting Started Getting-started V1.0 (2005 年 04 月 ) 摘 要 该文档主要面对初次使用定位模板 FM 354 的用户 内容包括一些调试的步骤, 使用经验, 等等 但是, 该文档无法取代 Manual FM354 建议: 用户通过此文档掌握了初步调试和使用模板的方法以后, 一定需要认真 仔细阅读 Manual
定位模板 FM 354 快速使用入门 FM354 Getting Started Getting-started V1.0 (2005 年 04 月 ) 摘 要 该文档主要面对初次使用定位模板 FM 354 的用户 内容包括一些调试的步骤, 使用经验, 等等 但是, 该文档无法取代 Manual FM354 建议: 用户通过此文档掌握了初步调试和使用模板的方法以后, 一定需要认真 仔细阅读 Manual
PowerPoint Presentation
 中 小 IT 企 业 人 力 资 源 管 理 咨 询 简 介 一 背 景 分 析 二 需 求 分 析 三 服 务 内 容 四 操 作 流 程 五 斯 隆 优 势 六 行 业 案 例 七 服 务 理 念 目 录 一 背 景 分 析 -IT 业 现 状 分 析 IT 产 业 的 总 量 水 平 较 低 中 国 IT IT 现 状 总 体 规 模 较 小 技 术 自 主 创 新 能 力 差 对 经 济 的
中 小 IT 企 业 人 力 资 源 管 理 咨 询 简 介 一 背 景 分 析 二 需 求 分 析 三 服 务 内 容 四 操 作 流 程 五 斯 隆 优 势 六 行 业 案 例 七 服 务 理 念 目 录 一 背 景 分 析 -IT 业 现 状 分 析 IT 产 业 的 总 量 水 平 较 低 中 国 IT IT 现 状 总 体 规 模 较 小 技 术 自 主 创 新 能 力 差 对 经 济 的
untitled
 SIMATIC S7-300 4/2 4/2 S7-300/S7-300F 4/4 4/4 CPU 312C - CPU 317F-2 DP 4/38 SIPLUS 4/38 SIPLUS CPU 312C, CPU 313C, CPU 314, CPU 315-2 DP 4/40 4/40 SM 321 4/46 SM 322 4/52 SM 323/SM 327 I/O 4/56 SIPLUS
SIMATIC S7-300 4/2 4/2 S7-300/S7-300F 4/4 4/4 CPU 312C - CPU 317F-2 DP 4/38 SIPLUS 4/38 SIPLUS CPU 312C, CPU 313C, CPU 314, CPU 315-2 DP 4/40 4/40 SM 321 4/46 SM 322 4/52 SM 323/SM 327 I/O 4/56 SIPLUS
1.pdf
 2003 3 simodrive 611 UNIVERSAL SIMODRIVE 611 3 SIMODRIVE SIMODRIVE 611 I/RF SIMODRIVE 611 SIMODRIVE SIMODRIVE 611 120 kw SIMODRIVE 611 universal 1FK7 1FT6 1PH7 1FN3 2 SIMODRIVE 611 SIMODRIVE 611 SIMODRIVE
2003 3 simodrive 611 UNIVERSAL SIMODRIVE 611 3 SIMODRIVE SIMODRIVE 611 I/RF SIMODRIVE 611 SIMODRIVE SIMODRIVE 611 120 kw SIMODRIVE 611 universal 1FK7 1FT6 1PH7 1FN3 2 SIMODRIVE 611 SIMODRIVE 611 SIMODRIVE
目录 1 PROFINET 通讯功能概述 非周期通讯 S 与 CU320-2 PN 的 PROFINET 非周期通讯实例 S 组态 组态与 CU320-2 PN 通讯报文 编程 :
 应用举例 04/2015 S7-1200 与 G150 CU320-2 PN 的 PROFINET 通讯第 2 部分非周期通讯读写参数 S7-1200,G150,CU320-2 PN,PROFINET, 非周期通讯, 读写参数 https://support.industry.siemens.com/cs/cn/zh/view/109476699 目录 1 PROFINET 通讯功能概述... 3
应用举例 04/2015 S7-1200 与 G150 CU320-2 PN 的 PROFINET 通讯第 2 部分非周期通讯读写参数 S7-1200,G150,CU320-2 PN,PROFINET, 非周期通讯, 读写参数 https://support.industry.siemens.com/cs/cn/zh/view/109476699 目录 1 PROFINET 通讯功能概述... 3
PROFIBUS3.doc
 PLC PLC ProfiBus 3. PROFIBUS-DP PROFIBUS-DP PROFIBUS-DP PROFIBUS S7 STEP7 SIMATIC NET S5 COM PROFIBUS COM5431 PROFIBUS-DP GSD GSD *.GSD *. GSE GSD S7 STEP7 PROFIBUS DP S7-400 CPU416-2DP S7-200 PROFIBUS
PLC PLC ProfiBus 3. PROFIBUS-DP PROFIBUS-DP PROFIBUS-DP PROFIBUS S7 STEP7 SIMATIC NET S5 COM PROFIBUS COM5431 PROFIBUS-DP GSD GSD *.GSD *. GSE GSD S7 STEP7 PROFIBUS DP S7-400 CPU416-2DP S7-200 PROFIBUS
上海盛瑞电子有限公司
 2015/5/22 1 / 9 一运动指令 MoveJ MoveJ[\Conc,]ToPoint,Speed[\V] [\T],Zone[\Z][\Inpos],Tool[\WObj]; 1 [\Conc,]: 协作运动开关 (switch) 2 ToPoint: 目标点, 默认为 * (robotarget) 3 Speed: 运行速度数据 (speeddata) 4 [\V]: 特殊运行速度 mm/s
2015/5/22 1 / 9 一运动指令 MoveJ MoveJ[\Conc,]ToPoint,Speed[\V] [\T],Zone[\Z][\Inpos],Tool[\WObj]; 1 [\Conc,]: 协作运动开关 (switch) 2 ToPoint: 目标点, 默认为 * (robotarget) 3 Speed: 运行速度数据 (speeddata) 4 [\V]: 特殊运行速度 mm/s
目 录 第 一 部 分 档 案 局 概 况 一 主 要 职 责 二 部 门 决 算 单 位 构 成 第 二 部 分 档 案 局 2016 年 度 部 门 预 算 表 一 2016 年 度 市 级 部 门 收 支 预 算 总 表 二 2016 年 度 市 级 部 门 支 出 预 算 表 三 2016
 档 案 局 2016 年 度 部 门 预 算 1 目 录 第 一 部 分 档 案 局 概 况 一 主 要 职 责 二 部 门 决 算 单 位 构 成 第 二 部 分 档 案 局 2016 年 度 部 门 预 算 表 一 2016 年 度 市 级 部 门 收 支 预 算 总 表 二 2016 年 度 市 级 部 门 支 出 预 算 表 三 2016 年 度 市 级 部 门 财 政 拨 款 支 出 预
档 案 局 2016 年 度 部 门 预 算 1 目 录 第 一 部 分 档 案 局 概 况 一 主 要 职 责 二 部 门 决 算 单 位 构 成 第 二 部 分 档 案 局 2016 年 度 部 门 预 算 表 一 2016 年 度 市 级 部 门 收 支 预 算 总 表 二 2016 年 度 市 级 部 门 支 出 预 算 表 三 2016 年 度 市 级 部 门 财 政 拨 款 支 出 预
2015 年 度 收 入 支 出 决 算 总 表 单 位 名 称 : 北 京 市 朝 阳 区 卫 生 局 单 位 : 万 元 收 入 支 出 项 目 决 算 数 项 目 ( 按 功 能 分 类 ) 决 算 数 一 财 政 拨 款 168738.36 一 一 般 公 共 服 务 支 出 53.83 二
 决 算 数 一 财 政 拨 款 168738.36 一 一 般 公 共 服 务 支 出 53.83 二") 2015 年 度 部 门 决 算 报 表 ( 含 三 公 经 费 决 算 ) 2015 年 度 收 入 支 出 决 算 总 表 单 位 名 称 : 北 京 市 朝 阳 区 卫 生 局 单 位 : 万 元 收 入 支 出 项 目 决 算 数 项 目 ( 按 功 能 分 类 ) 决 算 数 一 财 政 拨 款 168738.36 一 一 般 公 共 服 务 支 出 53.83 二 上 级 补 助 收 入
2015 年 度 部 门 决 算 报 表 ( 含 三 公 经 费 决 算 ) 2015 年 度 收 入 支 出 决 算 总 表 单 位 名 称 : 北 京 市 朝 阳 区 卫 生 局 单 位 : 万 元 收 入 支 出 项 目 决 算 数 项 目 ( 按 功 能 分 类 ) 决 算 数 一 财 政 拨 款 168738.36 一 一 般 公 共 服 务 支 出 53.83 二 上 级 补 助 收 入
<4D6963726F736F667420576F7264202D20D0C5CFA2BBAFB7A2D5B9D6D8B5E3D7A8CFEEB9E6BBAE2E646F63>
 国 民 经 济 和 社 会 发 展 第 十 个 五 年 计 划 信 息 化 发 展 重 点 专 项 规 划 前 言 信 息 化 是 当 今 世 界 科 技 经 济 与 社 会 发 展 的 重 要 趋 势 信 息 技 术 已 广 泛 渗 透 到 经 济 和 社 会 的 各 个 领 域, 推 动 人 类 社 会 生 产 力 达 到 一 个 崭 新 的 高 度 全 球 信 息 化 开 创 了 世 界 经
国 民 经 济 和 社 会 发 展 第 十 个 五 年 计 划 信 息 化 发 展 重 点 专 项 规 划 前 言 信 息 化 是 当 今 世 界 科 技 经 济 与 社 会 发 展 的 重 要 趋 势 信 息 技 术 已 广 泛 渗 透 到 经 济 和 社 会 的 各 个 领 域, 推 动 人 类 社 会 生 产 力 达 到 一 个 崭 新 的 高 度 全 球 信 息 化 开 创 了 世 界 经
关于建立境内违法互联网站黑名单管理制度的通知
 关 于 建 立 境 内 违 法 互 联 网 站 黑 名 单 管 理 制 度 的 通 知 各 省 自 治 区 直 辖 市 和 计 划 单 列 市 通 信 管 理 局 新 闻 办 教 育 厅 ( 教 委 ) 公 安 厅 ( 局 ) 国 家 安 全 厅 ( 局 ) 文 化 厅 ( 局 ) 卫 生 厅 ( 局 ) 工 商 行 政 管 理 局 广 播 影 视 局 新 闻 出 版 局 食 品 药 品 监 督 管
关 于 建 立 境 内 违 法 互 联 网 站 黑 名 单 管 理 制 度 的 通 知 各 省 自 治 区 直 辖 市 和 计 划 单 列 市 通 信 管 理 局 新 闻 办 教 育 厅 ( 教 委 ) 公 安 厅 ( 局 ) 国 家 安 全 厅 ( 局 ) 文 化 厅 ( 局 ) 卫 生 厅 ( 局 ) 工 商 行 政 管 理 局 广 播 影 视 局 新 闻 出 版 局 食 品 药 品 监 督 管
? 這 全 都 是 市 政 府 提 供 給 我 的 資 料 低 底 盤 公 車 計 畫 96 年 預 算 新 台 幣 4,500 萬 元 97 年 預 算 新 台 幣 1 億 6,500 萬 元 98 年 預 算 新 台 幣 3 億 2,300 萬 元, 共 有 307 台 低 底 盤 公 車,99
 民 政 部 門 質 詢 第 13 組 質 詢 日 期 : 中 華 民 國 98 年 10 月 6 日 質 詢 對 象 : 民 政 部 門 有 關 各 單 位 質 詢 議 員 : 陳 嘉 銘 周 柏 雅 陳 碧 峰 李 文 英 顏 聖 冠 王 孝 維 洪 健 益 計 7 位 時 間 126 分 鐘 速 記 錄 98 年 10 月 6 日 速 記 : 何 采 穎 主 席 ( 李 議 員 慶 元 ): 現
民 政 部 門 質 詢 第 13 組 質 詢 日 期 : 中 華 民 國 98 年 10 月 6 日 質 詢 對 象 : 民 政 部 門 有 關 各 單 位 質 詢 議 員 : 陳 嘉 銘 周 柏 雅 陳 碧 峰 李 文 英 顏 聖 冠 王 孝 維 洪 健 益 計 7 位 時 間 126 分 鐘 速 記 錄 98 年 10 月 6 日 速 記 : 何 采 穎 主 席 ( 李 議 員 慶 元 ): 現
untitled
 EM 253 V1.0 SLC A&D CS Beijing January 2005 Page 1 of 49 EM 253 SIMATIC S7 200 SIMATIC S7 200 9 EM 253 EM 253 EM 253 STEP 7-MicroWIN Page 2 of 49 Page 3 of 49 Page 4 of 49 1 1 EM 253 Page 5 of 49 EM 253
EM 253 V1.0 SLC A&D CS Beijing January 2005 Page 1 of 49 EM 253 SIMATIC S7 200 SIMATIC S7 200 9 EM 253 EM 253 EM 253 STEP 7-MicroWIN Page 2 of 49 Page 3 of 49 Page 4 of 49 1 1 EM 253 Page 5 of 49 EM 253
达美商贸香港有限公司 1. 规格 MCX314 简介! 控制轴 4 轴! CPU 数据总线长度 可选 8 位 /16 位 插补功能! 2 轴 /3 轴直线插补 # 插补范围 各个轴 -8,388,607 ~ +8,388,607 # 插补速度 1~ 4 MPPS # 插补位置精密度 0.5 LSB
 达美商贸香港有限公司 1. 规格! 控制轴 4 轴! CPU 数据总线长度 可选 8 位 /16 位 插补功能! 2 轴 /3 轴直线插补 # 插补范围 各个轴 -8,388,607 ~ +8,388,607 # 插补速度 1~ 4 MPPS # 插补位置精密度 0.5 LSB 以下 ( 在全插补范围内 )! 圆弧插补 # 插补范围 各个轴 -8,388,607 ~ +8,388,607 # 插补速度
达美商贸香港有限公司 1. 规格! 控制轴 4 轴! CPU 数据总线长度 可选 8 位 /16 位 插补功能! 2 轴 /3 轴直线插补 # 插补范围 各个轴 -8,388,607 ~ +8,388,607 # 插补速度 1~ 4 MPPS # 插补位置精密度 0.5 LSB 以下 ( 在全插补范围内 )! 圆弧插补 # 插补范围 各个轴 -8,388,607 ~ +8,388,607 # 插补速度
手册 doc
 1. 2. 3. 3.1 3.2 3.3 SD 3.4 3.5 SD 3.6 3.7 4. 4.1 4.2 4.3 SD 4.4 5. 5.1 5.2 5.3 SD 6. 1. 1~3 ( ) 320x240~704x288 66 (2G SD 320x2401FPS ) 32M~2G SD SD SD SD 24V DC 3W( ) -10~70 10~90% 154x44x144mm 2. DVR106
1. 2. 3. 3.1 3.2 3.3 SD 3.4 3.5 SD 3.6 3.7 4. 4.1 4.2 4.3 SD 4.4 5. 5.1 5.2 5.3 SD 6. 1. 1~3 ( ) 320x240~704x288 66 (2G SD 320x2401FPS ) 32M~2G SD SD SD SD 24V DC 3W( ) -10~70 10~90% 154x44x144mm 2. DVR106
untitled
 : 36 236 : (025)52121888 : (025)52121555/800 8289722 : 211100 h t t p://www.phoenixcontact.com.cn e-mail: phoenix@phoenixcontact.com.cn MNR 52005577/07.04.2010-01 Printed in China PHOENIX CONTACT 2010
: 36 236 : (025)52121888 : (025)52121555/800 8289722 : 211100 h t t p://www.phoenixcontact.com.cn e-mail: phoenix@phoenixcontact.com.cn MNR 52005577/07.04.2010-01 Printed in China PHOENIX CONTACT 2010
S7-200 PLC 脉冲输出 MAP 库文件的使用 Application of S7-200 PTO MAP Lib Getting Start Edition (2011 年 3 月 )
") S7-200 PLC 脉冲输出 MAP 库文件的使用 Application of S7-200 PTO MAP Lib Getting Start Edition (2011 年 3 月 ) 摘要该文档提供了 S7-200 PLC 脉冲输出指令库 MAP 的使用说明 该库基于 S7-200 PLC 本体脉冲输出指令, 用于帮助用户实现较复杂的定位功能, 控制伺服驱动或步进电机 关键词 S7-200
S7-200 PLC 脉冲输出 MAP 库文件的使用 Application of S7-200 PTO MAP Lib Getting Start Edition (2011 年 3 月 ) 摘要该文档提供了 S7-200 PLC 脉冲输出指令库 MAP 的使用说明 该库基于 S7-200 PLC 本体脉冲输出指令, 用于帮助用户实现较复杂的定位功能, 控制伺服驱动或步进电机 关键词 S7-200

GMC G系列表价_FY1516_0314.xlsx
 SINAMICS G0 变频器 kw 额定输出电流 A 1AC 200-20V 版本 Version 模拟量 0.12 0.9 USS 模拟量 ( 带平板散热器 ) A USS ( 带平板散热器 ) 模拟量 0.25 1.7 USS 模拟量 ( 带平板散热器 ) A USS ( 带平板散热器 ) 模拟量 0.7 2. USS 模拟量 ( 带平板散热器 ) A USS ( 带平板散热器 ) 模拟量.2
SINAMICS G0 变频器 kw 额定输出电流 A 1AC 200-20V 版本 Version 模拟量 0.12 0.9 USS 模拟量 ( 带平板散热器 ) A USS ( 带平板散热器 ) 模拟量 0.25 1.7 USS 模拟量 ( 带平板散热器 ) A USS ( 带平板散热器 ) 模拟量 0.7 2. USS 模拟量 ( 带平板散热器 ) A USS ( 带平板散热器 ) 模拟量.2
 SINAMICS S110 调试手册 05.2011 SINAMICS S110 Answers for industry. 目录 S110 产品介绍 1 项目组态与调试 2 SINAMICS S110 调试手册 05 2011 S110 的基本定位 3 S110 与 S7-300PLC 的 DP 通讯 4 S7-200/S7-1200 通过脉冲控制 S110 实现定位 5 自由功能块 6 SINAMICS
SINAMICS S110 调试手册 05.2011 SINAMICS S110 Answers for industry. 目录 S110 产品介绍 1 项目组态与调试 2 SINAMICS S110 调试手册 05 2011 S110 的基本定位 3 S110 与 S7-300PLC 的 DP 通讯 4 S7-200/S7-1200 通过脉冲控制 S110 实现定位 5 自由功能块 6 SINAMICS
操作指南 3/2015 利用 BSEND/BRCV 功能实现 S7-300/400 与 WinCC Professional 的大数据量交换 BSEND/BRCV, WinCC Professional, 原始数据
 操作指南 3/2015 利用 BSEND/BRCV 功能实现 S7-300/400 与 WinCC Professional 的大数据量交换 BSEND/BRCV, WinCC Professional, 原始数据 https://support.industry.siemens.com/cs/cn/zh/view/109477719 目录 1 WinCC BSEND/BRCV 功能介绍... 3
操作指南 3/2015 利用 BSEND/BRCV 功能实现 S7-300/400 与 WinCC Professional 的大数据量交换 BSEND/BRCV, WinCC Professional, 原始数据 https://support.industry.siemens.com/cs/cn/zh/view/109477719 目录 1 WinCC BSEND/BRCV 功能介绍... 3
用于工业以太网的S7-CP - 手册B3L部分 - CP 343-1 Lean
 SIMATIC NET 用 于 工 业 以 太 网 的 S7-CP 手 册 B3L 部 分 CP 343-1 Lean 6GK7 343--1CX10--0XE0 从 硬 件 版 本 V2, 固 件 版 本 V2.0 起 用 于 SIMATIC S7-300 / C7--300 LED 指 示 灯 TP 端 口 : 2x8 针 RJ--45 插 口 ( 位 于 前 面 板 后 面 ) X= 硬 件
SIMATIC NET 用 于 工 业 以 太 网 的 S7-CP 手 册 B3L 部 分 CP 343-1 Lean 6GK7 343--1CX10--0XE0 从 硬 件 版 本 V2, 固 件 版 本 V2.0 起 用 于 SIMATIC S7-300 / C7--300 LED 指 示 灯 TP 端 口 : 2x8 针 RJ--45 插 口 ( 位 于 前 面 板 后 面 ) X= 硬 件
08信息技术部.doc
 信 息 技 术 部 岗 位 设 置 及 描 述 9 人 岗 位 编 号 岗 位 名 称 岗 位 数 岗 位 级 次 0801 信 息 技 术 部 主 任 1 0802 系 统 工 程 师 2 1 0803 软 件 开 发 工 程 师 3 1 0804 系 统 管 理 员 1 1 0805 桌 面 工 程 师 1 2 0806 网 络 工 程 师 1 2 岗 位 编 号 :0801 所 属 部 门 信
信 息 技 术 部 岗 位 设 置 及 描 述 9 人 岗 位 编 号 岗 位 名 称 岗 位 数 岗 位 级 次 0801 信 息 技 术 部 主 任 1 0802 系 统 工 程 师 2 1 0803 软 件 开 发 工 程 师 3 1 0804 系 统 管 理 员 1 1 0805 桌 面 工 程 师 1 2 0806 网 络 工 程 师 1 2 岗 位 编 号 :0801 所 属 部 门 信
/ / (FC 3)...
...") Modbus/TCP 1.0 1999 3 29 Andy Swales Schneider aswales@modicon.com ... 2 1.... 3 2.... 3 2.1.. 3 2.2..4 2.3..4 2.4... 5 3.... 5 3.1 0... 5 3.2 1... 5 3.3 2... 6 3.4 / /... 7 4.... 7 5.... 8 5.1 0... 9
Modbus/TCP 1.0 1999 3 29 Andy Swales Schneider aswales@modicon.com ... 2 1.... 3 2.... 3 2.1.. 3 2.2..4 2.3..4 2.4... 5 3.... 5 3.1 0... 5 3.2 1... 5 3.3 2... 6 3.4 / /... 7 4.... 7 5.... 8 5.1 0... 9
基于 SIMATIC IOT2040 的 Node-red S7 通信 1. 主要目标 基于 Node-red S7 通信, 实现 SIMATIC IOT2040 读写 Siemens S7-300/400/1200/1500 或 S7-200 Smart PLC 中的数据 2. Node-red
 基于 SIMATIC IOT2040 的 Node-red S7 通信 1. 主要目标 基于 Node-red S7 通信, 实现 SIMATIC IOT2040 读写 Siemens S7-300/400/1200/1500 或 S7-200 Smart PLC 中的数据 2. Node-red 及 S7 节点介绍 2.1 Node-red Node-red 是一种用于以新的有趣的方式将硬件设备
基于 SIMATIC IOT2040 的 Node-red S7 通信 1. 主要目标 基于 Node-red S7 通信, 实现 SIMATIC IOT2040 读写 Siemens S7-300/400/1200/1500 或 S7-200 Smart PLC 中的数据 2. Node-red 及 S7 节点介绍 2.1 Node-red Node-red 是一种用于以新的有趣的方式将硬件设备
序 文 藝 社 (Society of Chinese Literature) 在 去 年 暑 假 開 始 籌 措 成 立, 二 零 一 三 年 九 月 正 式 展 開 所 有 活 動 文 藝 社 成 立 的 目 的 旨 在 讓 學 生 學 習 欣 賞 歷 代 名 篇 名 作, 其 中 以 古 典
 在 去 年 暑 假 開 始 籌 措 成 立, 二 零 一 三 年 九 月 正 式 展 開 所 有 活 動 文 藝 社 成 立 的 目 的 旨 在 讓 學 生 學 習 欣 賞 歷 代 名 篇 名 作, 其 中 以 古 典") 序 文 藝 社 (Society of Chinese Literature) 在 去 年 暑 假 開 始 籌 措 成 立, 二 零 一 三 年 九 月 正 式 展 開 所 有 活 動 文 藝 社 成 立 的 目 的 旨 在 讓 學 生 學 習 欣 賞 歷 代 名 篇 名 作, 其 中 以 古 典 散 文 為 主 ; 開 拓 學 生 的 文 藝 視 角 和 創 作 平 台 ; 強 化 對 外 的 創
序 文 藝 社 (Society of Chinese Literature) 在 去 年 暑 假 開 始 籌 措 成 立, 二 零 一 三 年 九 月 正 式 展 開 所 有 活 動 文 藝 社 成 立 的 目 的 旨 在 讓 學 生 學 習 欣 賞 歷 代 名 篇 名 作, 其 中 以 古 典 散 文 為 主 ; 開 拓 學 生 的 文 藝 視 角 和 創 作 平 台 ; 強 化 對 外 的 創
选定方法 步进电机(带编码器 D24V) LEFS LEF 垂直 部为加减速度2mm/s 导程8:LEY LER 导程8:LEY LEH 垂直 8
 LEFS LEF 垂直 部为加减速度2mm/s 导程8:LEY LER 导程8:LEY LEH 垂直 8") 步进电机(带编码器 D24V) 伺服电机(D24V) 电动执行器 出杆型 LEY-X 系列 选定方法 LEY-X 系列 P.477 LEP LE6 由P.22 速度搬运质量图(基准) 步进电机(带编码器 D24V) LEP6 LEP1 LEPMJ的场合 水平 垂直 8 3 6 垂直 水平 部为加减速度2mm/s2 7 4 3 2 1 1 2 3 4 3 29 2 1 1 7 6 1 2 9 部为加减速度2mm/s2
步进电机(带编码器 D24V) 伺服电机(D24V) 电动执行器 出杆型 LEY-X 系列 选定方法 LEY-X 系列 P.477 LEP LE6 由P.22 速度搬运质量图(基准) 步进电机(带编码器 D24V) LEP6 LEP1 LEPMJ的场合 水平 垂直 8 3 6 垂直 水平 部为加减速度2mm/s2 7 4 3 2 1 1 2 3 4 3 29 2 1 1 7 6 1 2 9 部为加减速度2mm/s2
公 司 概 况 业 务 挑 战 达 美 乐 比 萨 达 美 乐 比 萨 是 全 球 最 大 的 比 萨 外 卖 品 牌, 成 立 于 1960 年, 目 前 在 全 球 67 个 国 家 拥 有 超 过 9000 家 门 店, 年 销 售 比 萨 4 亿 张 以 上 1990 年, 韩 国 第 一
 公 司 概 况 业 务 挑 战 达 美 乐 比 萨 达 美 乐 比 萨 是 全 球 最 大 的 比 萨 外 卖 品 牌, 成 立 于 1960 年, 目 前 在 全 球 67 个 国 家 拥 有 超 过 9000 家 门 店, 年 销 售 比 萨 4 亿 张 以 上 1990 年, 韩 国 第 一 家 达 美 乐 比 萨 店 开 业 2003 年 9 月, 达 美 乐 在 行 业 内 率 先 实 施
公 司 概 况 业 务 挑 战 达 美 乐 比 萨 达 美 乐 比 萨 是 全 球 最 大 的 比 萨 外 卖 品 牌, 成 立 于 1960 年, 目 前 在 全 球 67 个 国 家 拥 有 超 过 9000 家 门 店, 年 销 售 比 萨 4 亿 张 以 上 1990 年, 韩 国 第 一 家 达 美 乐 比 萨 店 开 业 2003 年 9 月, 达 美 乐 在 行 业 内 率 先 实 施
SDK 概要 使用 Maven 的用户可以从 Maven 库中搜索 "odps-sdk" 获取不同版本的 Java SDK: 包名 odps-sdk-core odps-sdk-commons odps-sdk-udf odps-sdk-mapred odps-sdk-graph 描述 ODPS 基
 开放数据处理服务 ODPS SDK SDK 概要 使用 Maven 的用户可以从 Maven 库中搜索 "odps-sdk" 获取不同版本的 Java SDK: 包名 odps-sdk-core odps-sdk-commons odps-sdk-udf odps-sdk-mapred odps-sdk-graph 描述 ODPS 基础功能的主体接口, 搜索关键词 "odpssdk-core" 一些
开放数据处理服务 ODPS SDK SDK 概要 使用 Maven 的用户可以从 Maven 库中搜索 "odps-sdk" 获取不同版本的 Java SDK: 包名 odps-sdk-core odps-sdk-commons odps-sdk-udf odps-sdk-mapred odps-sdk-graph 描述 ODPS 基础功能的主体接口, 搜索关键词 "odpssdk-core" 一些
Microsoft PowerPoint - BECKHOFF技术_ADS通讯 [Compatibility Mode]
![Microsoft PowerPoint - BECKHOFF技术_ADS通讯 [Compatibility Mode]](/thumbs/99/140543418.jpg "Microsoft PowerPoint - BECKHOFF技术_ADS通讯 [Compatibility Mode]") 的架构 ADS 的通讯机制 ADS-Client Request -> Confirmation Indication
的架构 ADS 的通讯机制 ADS-Client Request -> Confirmation Indication
目录 1 IPv6 PIM Snooping 配置命令 IPv6 PIM Snooping 配置命令 display pim-snooping ipv6 neighbor display pim-snooping ipv6 routing-ta
 目录 1 IPv6 PIM Snooping 配置命令 1-1 1.1 IPv6 PIM Snooping 配置命令 1-1 1.1.1 display pim-snooping ipv6 neighbor 1-1 1.1.2 display pim-snooping ipv6 routing-table 1-2 1.1.3 display pim-snooping ipv6 statistics
目录 1 IPv6 PIM Snooping 配置命令 1-1 1.1 IPv6 PIM Snooping 配置命令 1-1 1.1.1 display pim-snooping ipv6 neighbor 1-1 1.1.2 display pim-snooping ipv6 routing-table 1-2 1.1.3 display pim-snooping ipv6 statistics
坐 公 車 好 處 多 得 獎 者 : 李 宥 萱 指 導 老 師 : 陳 淑 鈴 我 家 住 在 鄉 下, 離 市 區 有 段 距 離 每 個 禮 拜 三 和 禮 拜 六 我 都 要 到 市 區 補 習, 以 前 都 是 媽 媽 特 地 從 大 老 遠 的 地 方 開 車 回 來 載 我 這 實
 富 有 的 標 準 得 獎 者 : 朱 庭 萱 指 導 老 師 : 陳 怡 君 有 一 種 付 出, 如 工 蜂 般 默 默 奉 獻 自 己 的 一 生, 沒 有 怨 言 ; 有 一 種 付 出, 如 蚯 蚓 般 不 受 重 視, 沒 有 掌 聲, 卻 不 能 沒 有 ; 有 一 種 付 出, 如 落 葉 班 滋 養 大 地, 不 求 回 報, 那 就 是 無 私 的 貢 獻 一 般 人 總 是 以
富 有 的 標 準 得 獎 者 : 朱 庭 萱 指 導 老 師 : 陳 怡 君 有 一 種 付 出, 如 工 蜂 般 默 默 奉 獻 自 己 的 一 生, 沒 有 怨 言 ; 有 一 種 付 出, 如 蚯 蚓 般 不 受 重 視, 沒 有 掌 聲, 卻 不 能 沒 有 ; 有 一 種 付 出, 如 落 葉 班 滋 養 大 地, 不 求 回 報, 那 就 是 無 私 的 貢 獻 一 般 人 總 是 以
untitled
 0.37kW 250kW D11.7 2009 SINAMICS G120 0.37kW 250kW SINAMICS G120 Answers for industry. SINAMICS G120 0.37kW 250kW SINAMICS G110 D 11.1 0.12 kw 3 kw CA01 MC CA01 MC CD : E20001-K20-C-V2-5D00 141-P90534-09020
0.37kW 250kW D11.7 2009 SINAMICS G120 0.37kW 250kW SINAMICS G120 Answers for industry. SINAMICS G120 0.37kW 250kW SINAMICS G110 D 11.1 0.12 kw 3 kw CA01 MC CA01 MC CD : E20001-K20-C-V2-5D00 141-P90534-09020
instructions.PDF
 94 SIMATIC (END) (END) Micro/WIN 32 (STOP) (STOP) CPU RUN STOP STOP CPU RUN STOP (WDR) (Watchdog Reset) (WDR) CPU WDR WDR ( ) I/O ( I/O ) SM (SM0 SM5 SM29 ) 25 0 ms 00 ms STOP 300ms 300ms WDR S7-200 CPU
94 SIMATIC (END) (END) Micro/WIN 32 (STOP) (STOP) CPU RUN STOP STOP CPU RUN STOP (WDR) (Watchdog Reset) (WDR) CPU WDR WDR ( ) I/O ( I/O ) SM (SM0 SM5 SM29 ) 25 0 ms 00 ms STOP 300ms 300ms WDR S7-200 CPU
!!""# $ %#" & $$ % $()! *% $!*% +,-. / 0 %%"#" 0 $%1 0 * $! $#)2 "
! *% $!*% +,-. / 0 %%# 0 $%1 0 * $! $#)2") ! """"""""""""""""""" " !!""# $ %#" & $$ % $()! *% $!*% +,-. / 0 %%"#" 0 $%1 0 * $! $#)2 " !"#$%#$&!!!!!!!!!!!!!!!!!!!!!!!!!!!"#$%& (& #) *+&,"-./%0 1 2"0*-"3* #4 5%&6&4"&00 78 9+& :"/;& 7< 9+& =#4-%%/
! """"""""""""""""""" " !!""# $ %#" & $$ % $()! *% $!*% +,-. / 0 %%"#" 0 $%1 0 * $! $#)2 " !"#$%#$&!!!!!!!!!!!!!!!!!!!!!!!!!!!"#$%& (& #) *+&,"-./%0 1 2"0*-"3* #4 5%&6&4"&00 78 9+& :"/;& 7< 9+& =#4-%%/
安全注意事项 2. 设置对焦模式 3. 变焦 1. 安装和卸下镜头 4. 固定变焦环 1 2 CHI-2
 CHI EF 镜头使用说明书 EF24-70mm f/4l IS USM 感谢您购买佳能产品! 使用注意事项 如果将镜头从寒冷的环境拿到温暖的环境中, 镜头表面和内部零件可能会发生结露 高温可能导致镜头故障 特点 安全注意事项 安全注意事项 请勿透过镜头或相机观看太阳或明亮的光源 无论镜头是否装在相机上, 请勿将没有盖上镜头盖的镜头置于太阳下 本说明中使用的符号 CHI-1 安全注意事项 2. 设置对焦模式
CHI EF 镜头使用说明书 EF24-70mm f/4l IS USM 感谢您购买佳能产品! 使用注意事项 如果将镜头从寒冷的环境拿到温暖的环境中, 镜头表面和内部零件可能会发生结露 高温可能导致镜头故障 特点 安全注意事项 安全注意事项 请勿透过镜头或相机观看太阳或明亮的光源 无论镜头是否装在相机上, 请勿将没有盖上镜头盖的镜头置于太阳下 本说明中使用的符号 CHI-1 安全注意事项 2. 设置对焦模式
工业串口通信之如何使用 S 的 CM1241 模块 原创文章, 转载请注明出处 更多实用资料请登录方正智芯官网 : 作者 : 北岛李工工控行业的小伙伴们都知道以前在中低端 PLC 市场西门子有 S7-200 系列产品, 但是细心的你也许早就发现,S7
 工业串口通信之如何使用 S7-1200 的 CM1241 模块 原创文章, 转载请注明出处 更多实用资料请登录方正智芯官网 :www.founderchip.com 作者 : 北岛李工工控行业的小伙伴们都知道以前在中低端 PLC 市场西门子有 S7-200 系列产品, 但是细心的你也许早就发现,S7-200 系列 PLC 在组态编程上都与 S7-300/400 系列有很大的不同 S7-300/400
工业串口通信之如何使用 S7-1200 的 CM1241 模块 原创文章, 转载请注明出处 更多实用资料请登录方正智芯官网 :www.founderchip.com 作者 : 北岛李工工控行业的小伙伴们都知道以前在中低端 PLC 市场西门子有 S7-200 系列产品, 但是细心的你也许早就发现,S7-200 系列 PLC 在组态编程上都与 S7-300/400 系列有很大的不同 S7-300/400
TD
 *TD-000212-05* 20- 应用实例 4 本例显示的是使用两个亚低 音扬声器和多个顶箱的双声 道 立体声 设置 除了各声道都增加了一个顶 箱外 也可以增加更多的顶 箱 本例和例 3 的情况一 致 声道 2 或 右声道 声道 1 或 左声道 要接到更多的顶箱 将最后 一个顶箱的全幅线路输出接 头处的线缆接到下一个顶箱 的全幅线路输入接头 在不 降低信号质量的情况下 最
*TD-000212-05* 20- 应用实例 4 本例显示的是使用两个亚低 音扬声器和多个顶箱的双声 道 立体声 设置 除了各声道都增加了一个顶 箱外 也可以增加更多的顶 箱 本例和例 3 的情况一 致 声道 2 或 右声道 声道 1 或 左声道 要接到更多的顶箱 将最后 一个顶箱的全幅线路输出接 头处的线缆接到下一个顶箱 的全幅线路输入接头 在不 降低信号质量的情况下 最
untitled
 SIMATIC NET CP 243-1 A B C D SIMATIC NET 10/2002 J31069-D0428-U001-A-7618 2002 Postfach 48 48 D-90327 Nürnberg Siemens Aktiengesellschaft J31069-D0428-U001-A1-7618 ii SIMATIC SIMATIC NET SINEC SIMATIC
SIMATIC NET CP 243-1 A B C D SIMATIC NET 10/2002 J31069-D0428-U001-A-7618 2002 Postfach 48 48 D-90327 Nürnberg Siemens Aktiengesellschaft J31069-D0428-U001-A1-7618 ii SIMATIC SIMATIC NET SINEC SIMATIC
目 录 行 政 总 结... Error! Bookmark not defined. 1. 简 介... 4 2. 调 查... 4 3. 产 品 市 场 与 员 工 架 构... 5 4. 鞋 厂 正 面 临 着 哪 些 主 要 挑 战... 6 5. 劳 动 力 成 本... 7 6. 劳 动
 工 厂 调 查 分 析 2013 年 目 录 行 政 总 结... Error! Bookmark not defined. 1. 简 介... 4 2. 调 查... 4 3. 产 品 市 场 与 员 工 架 构... 5 4. 鞋 厂 正 面 临 着 哪 些 主 要 挑 战... 6 5. 劳 动 力 成 本... 7 6. 劳 动 力 短 缺 问 题 是 否 难 以 管 理... 10 7.
工 厂 调 查 分 析 2013 年 目 录 行 政 总 结... Error! Bookmark not defined. 1. 简 介... 4 2. 调 查... 4 3. 产 品 市 场 与 员 工 架 构... 5 4. 鞋 厂 正 面 临 着 哪 些 主 要 挑 战... 6 5. 劳 动 力 成 本... 7 6. 劳 动 力 短 缺 问 题 是 否 难 以 管 理... 10 7.
國家圖書館典藏電子全文
 1 value free 3 2 4 1 2 1 2 16 1 (Passive Status) 2 (Negative Status) 3 (Positive Status) 4 (Active Status) 1 2 3 4 5 / intelligentsia 1. 2. 3. 1 (parochials) 2 (subject) 3 participant
1 value free 3 2 4 1 2 1 2 16 1 (Passive Status) 2 (Negative Status) 3 (Positive Status) 4 (Active Status) 1 2 3 4 5 / intelligentsia 1. 2. 3. 1 (parochials) 2 (subject) 3 participant
 3. 构造和动作原理 3.1 概要 主要元件有 开关机构 自动脱扣装置 带手动脱扣 按钮 触点 消弧装置 接线端子及塑壳 消弧装置 三菱的MCCB以栅极空隙 形状与 材料的最佳组合获得超群的消弧性 能 塑壳 上盖 磁束 塑壳 底座 栅极 电弧 磁力 消弧 触点 脱扣按钮 按下脱扣 可进行外部机械式脱扣 用于确认 附件开关和手动复位功能的动作 开关机构 触点快速开关 开关速度与操纵柄 的移动速度无关
3. 构造和动作原理 3.1 概要 主要元件有 开关机构 自动脱扣装置 带手动脱扣 按钮 触点 消弧装置 接线端子及塑壳 消弧装置 三菱的MCCB以栅极空隙 形状与 材料的最佳组合获得超群的消弧性 能 塑壳 上盖 磁束 塑壳 底座 栅极 电弧 磁力 消弧 触点 脱扣按钮 按下脱扣 可进行外部机械式脱扣 用于确认 附件开关和手动复位功能的动作 开关机构 触点快速开关 开关速度与操纵柄 的移动速度无关
untitled
 XP248 1 XP248 XP248 DCS PLC SCnet SCnet DCS SCnet DCS 1.1 XP248 Modbus HostLink Modbus XP248 4 DB25 XP248 MODBUS XP248 SCControl XP248 4 RS232 RS485 4 32 XP248 COM0-COM1 COM2-COM3 1200 19200bit/s 5 8 1
XP248 1 XP248 XP248 DCS PLC SCnet SCnet DCS SCnet DCS 1.1 XP248 Modbus HostLink Modbus XP248 4 DB25 XP248 MODBUS XP248 SCControl XP248 4 RS232 RS485 4 32 XP248 COM0-COM1 COM2-COM3 1200 19200bit/s 5 8 1
摘要本文通过一些简单的说明, 描述怎样设置 ET200S 功能模块 1STEP 模块的参数, 以及应用 操作和测试相应的软硬件 功能模块 1STEP 主要包括 2 种操作模式 : 寻找参考点模式 增量模式 本文会针对这 2 种模式分别进行介绍 关键词 ET200S,1STEP, 功能模块, 步进,
 ET200S 1 STEP 步进模块使用入门 Getting Started of ET200S 1 STEP 5V/204KHz Getting Started Edition (2010 年 7 月 ) 摘要本文通过一些简单的说明, 描述怎样设置 ET200S 功能模块 1STEP 模块的参数, 以及应用 操作和测试相应的软硬件 功能模块 1STEP 主要包括 2 种操作模式 : 寻找参考点模式
ET200S 1 STEP 步进模块使用入门 Getting Started of ET200S 1 STEP 5V/204KHz Getting Started Edition (2010 年 7 月 ) 摘要本文通过一些简单的说明, 描述怎样设置 ET200S 功能模块 1STEP 模块的参数, 以及应用 操作和测试相应的软硬件 功能模块 1STEP 主要包括 2 种操作模式 : 寻找参考点模式
Microsoft Word dot
 8.2 n ØŒ õ w STEP 7 q ØŒùÄ ~êq ùxžùm np ö² q OB FB DB SFC xöü v q à Ãq ŸŽÙ~ ²Í HMI WinCC qèrf m q ±Í CPU ²Ÿ Çj à CPU ö q n HMI WinCC xç à 1 Ë STEP 7 Èr vz STEP 7 fë füg ReportEr qèr Ãl rfqüü z CPU g CPU
8.2 n ØŒ õ w STEP 7 q ØŒùÄ ~êq ùxžùm np ö² q OB FB DB SFC xöü v q à Ãq ŸŽÙ~ ²Í HMI WinCC qèrf m q ±Í CPU ²Ÿ Çj à CPU ö q n HMI WinCC xç à 1 Ë STEP 7 Èr vz STEP 7 fë füg ReportEr qèr Ãl rfqüü z CPU g CPU
Sitrain China 西 门 子 工 业 技 术 培 训 中 心 在 中 国 北 京 培 训 中 心 上 海 培 训 中 心 广 州 培 训 中 心 济 南 南 京 沈 阳 培 训 中 心 重 庆 培 训 中 心 武 汉 培 训 中 心 培 训 中 心 网 站
 西 门 子 工 业 技 术 培 训 在 中 国 培 训 助 力 个 人 卓 越 与 企 业 发 展 课 程 产 品 样 本 Answers for industry. Sitrain China 西 门 子 工 业 技 术 培 训 中 心 在 中 国 北 京 培 训 中 心 上 海 培 训 中 心 广 州 培 训 中 心 济 南 南 京 沈 阳 培 训 中 心 重 庆 培 训 中 心 武 汉 培 训
西 门 子 工 业 技 术 培 训 在 中 国 培 训 助 力 个 人 卓 越 与 企 业 发 展 课 程 产 品 样 本 Answers for industry. Sitrain China 西 门 子 工 业 技 术 培 训 中 心 在 中 国 北 京 培 训 中 心 上 海 培 训 中 心 广 州 培 训 中 心 济 南 南 京 沈 阳 培 训 中 心 重 庆 培 训 中 心 武 汉 培 训
Worksheet in D: Users z002pw0a-e01 Desktop List price Adjustment FY1011_LV.rtf
 FY09/10 人民币表价 5SJ6 小型断路器 标 准 : IEC 60898-1 / GB10963.1 额定电压 : 1P: 230/400V AC / 1P+N: 230V AV / 2,3,4P,3P+N: 400V AC 额定电流 : 0.3~63A 分断能力 : 6KA 脱扣曲线 : C/D start 2010/09 5SJ61147CC20 1 0.3 5SJ6 1P C0.3 55.10
FY09/10 人民币表价 5SJ6 小型断路器 标 准 : IEC 60898-1 / GB10963.1 额定电压 : 1P: 230/400V AC / 1P+N: 230V AV / 2,3,4P,3P+N: 400V AC 额定电流 : 0.3~63A 分断能力 : 6KA 脱扣曲线 : C/D start 2010/09 5SJ61147CC20 1 0.3 5SJ6 1P C0.3 55.10
: ( ) : : / : ISBN 7-5017 - 6110-3/ F5112 : 5. 00 : 2006 2 1 CIP (2006) 039755
 : : / : ISBN 7-5017 - 6110-3/ F5112 : 5. 00 : 2006 2 1 CIP (2006) 039755") : ( ) : : / : ISBN 7-5017 - 6110-3/ F5112 : 5. 00 : 2006 2 1 CIP (2006) 039755 1 2 9 16 20 22 25 30 38 41 47 56 61 66 70 75 82 1 7 90 95 100 107 115 121 : 128 134 139 150 2 , 1,,,,,,, :, 2001 11 23,, 8,,,,
: ( ) : : / : ISBN 7-5017 - 6110-3/ F5112 : 5. 00 : 2006 2 1 CIP (2006) 039755 1 2 9 16 20 22 25 30 38 41 47 56 61 66 70 75 82 1 7 90 95 100 107 115 121 : 128 134 139 150 2 , 1,,,,,,, :, 2001 11 23,, 8,,,,
untitled
 info FAULHABER info 2 FAULHABER info 3 FAULHABER info 4 FAULHABER info 5 FAULHABER info 设备与工艺 海底地震仪 借助高转矩密度 精密运动 多个小型步进电机可 海底地震检波器如 小型海底地震仪必 须是坚固可靠的 6 FAULHABER FA AULHABER A ULHAB R info in nfo fo 2 2012
info FAULHABER info 2 FAULHABER info 3 FAULHABER info 4 FAULHABER info 5 FAULHABER info 设备与工艺 海底地震仪 借助高转矩密度 精密运动 多个小型步进电机可 海底地震检波器如 小型海底地震仪必 须是坚固可靠的 6 FAULHABER FA AULHABER A ULHAB R info in nfo fo 2 2012
MICROMASTER 410/420/430/440 DA kW 250kW MICROMASTER Eco & MIDIMASTER Eco MICROMASTER, MICROMASTER Vector DA64 MIDIMASTER Vector 90kW (Low
 DA51.2 2002 micromaster MICROMASTER 410/420/430/440 0.12kW 250kW s MICROMASTER 410/420/430/440 DA51.2 2002 0.12kW 250kW MICROMASTER Eco & MIDIMASTER Eco MICROMASTER, MICROMASTER Vector DA64 MIDIMASTER
DA51.2 2002 micromaster MICROMASTER 410/420/430/440 0.12kW 250kW s MICROMASTER 410/420/430/440 DA51.2 2002 0.12kW 250kW MICROMASTER Eco & MIDIMASTER Eco MICROMASTER, MICROMASTER Vector DA64 MIDIMASTER
SINAMICS G120C 多媒體訓練套件
 SINAMICS G0C 多媒體訓練套件 www.siemens.com/sinamics-g0c 變頻器家族 SINAMICS G0C 0-07. (BOP-) 0 (BOP-) 0 06 操作員面板 BOP- 及 IOP 08-9. BOP- 08 09. BOP-. 6 6 8. IOP 9 ( izards) 9 STARTER 軟體及 PC 0-8. STARTER. 7. 5 . 基本操作員面板
SINAMICS G0C 多媒體訓練套件 www.siemens.com/sinamics-g0c 變頻器家族 SINAMICS G0C 0-07. (BOP-) 0 (BOP-) 0 06 操作員面板 BOP- 及 IOP 08-9. BOP- 08 09. BOP-. 6 6 8. IOP 9 ( izards) 9 STARTER 軟體及 PC 0-8. STARTER. 7. 5 . 基本操作員面板
Microsoft Word - ET 200SP Brochure_tc_all.doc
 產品說明書 : 2013. 06 IO SIMATIC ET 200SP 使用簡單 體積更輕巧 性能更強大 QR QR 更高效率的自動系統 更高的生產力 SIMATIC ET 200SP PROFINET SIMATIC ET 200SP SIMATIC ET 200SP SIMATIC ET 200SP SIMATIC ET 200 SP SIMATIC ET 200 SP PROFINET SIMATIC
產品說明書 : 2013. 06 IO SIMATIC ET 200SP 使用簡單 體積更輕巧 性能更強大 QR QR 更高效率的自動系統 更高的生產力 SIMATIC ET 200SP PROFINET SIMATIC ET 200SP SIMATIC ET 200SP SIMATIC ET 200SP SIMATIC ET 200 SP SIMATIC ET 200 SP PROFINET SIMATIC
摘要 : 本文介绍了 SIMOTION D 运动控制系统项目的建立 系统调试及运动控制程序的编写 关键词 : SIMOTION D 运动控制系统 项目建立 调试 编程 Key words: SIMOTION D Motion Control System Create Project Program
 SIMOTION D 系统组态及调试入门 SIMOTION D System Configuration And Commissioning Getting Start 快速入门 Edition 03/ 2007 摘要 : 本文介绍了 SIMOTION D 运动控制系统项目的建立 系统调试及运动控制程序的编写 关键词 : SIMOTION D 运动控制系统 项目建立 调试 编程 Key words:
SIMOTION D 系统组态及调试入门 SIMOTION D System Configuration And Commissioning Getting Start 快速入门 Edition 03/ 2007 摘要 : 本文介绍了 SIMOTION D 运动控制系统项目的建立 系统调试及运动控制程序的编写 关键词 : SIMOTION D 运动控制系统 项目建立 调试 编程 Key words:
 裁剪 上 下 左 右 61.5 61.5 43.5 43.5 mm mm mm mm 马达控制器 CMMS/CMMD 的 DeviceNet 连接 说明 DeviceNet CMMS-ST CMMS-AS CMMD-AS 说明 zh 1103a [757 728] 版 本 zh 1103a 名 称 P.BE-CMMS-FHPP-DN-SW-ZH 订 货 号 757 728 (Festo AG &
裁剪 上 下 左 右 61.5 61.5 43.5 43.5 mm mm mm mm 马达控制器 CMMS/CMMD 的 DeviceNet 连接 说明 DeviceNet CMMS-ST CMMS-AS CMMD-AS 说明 zh 1103a [757 728] 版 本 zh 1103a 名 称 P.BE-CMMS-FHPP-DN-SW-ZH 订 货 号 757 728 (Festo AG &
摘要本文对 SIMOTION C 系统中的应用进行了介绍 关键词 SIMOTION C Key Words SIMOTION C IA&DT Service & Support Page 2-29
 SIMOTION C 使用入门 SIMOTION C Getting Started Getting-started Edition (2009 年 -12 月 ) 摘要本文对 SIMOTION C 系统中的应用进行了介绍 关键词 SIMOTION C Key Words SIMOTION C IA&DT Service & Support Page 2-29 目 录 1 SIMOTION C 概述...4
SIMOTION C 使用入门 SIMOTION C Getting Started Getting-started Edition (2009 年 -12 月 ) 摘要本文对 SIMOTION C 系统中的应用进行了介绍 关键词 SIMOTION C Key Words SIMOTION C IA&DT Service & Support Page 2-29 目 录 1 SIMOTION C 概述...4
TouchWin Human Machine Interface
 Human Machine Interface TP 1 2 3 1 2 3 4 5 TP 1 PLC 113 TouchWin / 2 TouchWin PLC Programmable Logical Controller PLC CAD/CAM PLC I/O 3 TouchWin...3...4...6 1... 6 1-1... 7 1-2... 8 1-3... 10 1-4... 13
Human Machine Interface TP 1 2 3 1 2 3 4 5 TP 1 PLC 113 TouchWin / 2 TouchWin PLC Programmable Logical Controller PLC CAD/CAM PLC I/O 3 TouchWin...3...4...6 1... 6 1-1... 7 1-2... 8 1-3... 10 1-4... 13
SCE_DE_ _R1201_S7-1200_Analogwerte
 集成自动化解决方案全集成自动化 (TIA) 博途 (TIA Portal) 模块 010-050 使用 SIMATIC S7-1200 进行模拟值处理 第 1 页, 共 34 页 SIMATIC S7-1200 AC/DC/RELAY 6er "TIA Portal" 订货号 :6ES7214-1BE30-4AB3 SIMATIC S7-1200 DC/DC/DC 6er "TIA Portal"
集成自动化解决方案全集成自动化 (TIA) 博途 (TIA Portal) 模块 010-050 使用 SIMATIC S7-1200 进行模拟值处理 第 1 页, 共 34 页 SIMATIC S7-1200 AC/DC/RELAY 6er "TIA Portal" 订货号 :6ES7214-1BE30-4AB3 SIMATIC S7-1200 DC/DC/DC 6er "TIA Portal"
 吉林大学学报 工学版 244 第 4 卷 复杂 鉴于本文篇幅所限 具体公式可详见参考文 献 7 每帧的动力学方程建立及其解算方法如图 3 所示 图4 滚转角速度与输入量 η 随时间的变化波形 Fig 4 Waveform of roll rate and input η with time changing 图5 Fig 5 滚转角随时间的变化波形 Waveform of roll angle with
吉林大学学报 工学版 244 第 4 卷 复杂 鉴于本文篇幅所限 具体公式可详见参考文 献 7 每帧的动力学方程建立及其解算方法如图 3 所示 图4 滚转角速度与输入量 η 随时间的变化波形 Fig 4 Waveform of roll rate and input η with time changing 图5 Fig 5 滚转角随时间的变化波形 Waveform of roll angle with