Sensorless BLDC Control with Back-EMF Filtering Using a Majority Function
|
|
|
- 蛙 封
- 5 years ago
- Views:
Transcription
 或 PIC24 单片机来实现无刷直流 (Brushless Direct Current, BLDC) 电机无传感器控制的算法 该算法利用对反电动势 (Back-Electromotive Force,BEMF) 进行数字滤波的择多函数来实现")
1 用择多函数实现反电动势滤波的无传感器 BLDC 控制 作者 : 引言 Adrian Lita 和 Mihai Cheles Microchip Technology Inc. 本应用笔记介绍一种采用 dspic 数字信号控制器 (Digital Signal Controller, DSC) 或 PIC24 单片机来实现无刷直流 (Brushless Direct Current, BLDC) 电机无传感器控制的算法 该算法利用对反电动势 (Back-Electromotive Force,BEMF) 进行数字滤波的择多函数来实现 通过对电机的每一相进行滤波来确定电机驱动电压换相的时刻 这一控制技术省却了分立的低通滤波硬件和片外比较器 需指出, 这里论述的所有内容及应用软件, 都是假定使用三相电机 该电机控制算法包括四个主要部分 : 利用 DSC 或单片机的模数转换器 (Analog-to-Digital Converter,ADC) 来采样梯形波 BEMF 信号 PWM 导通侧 ADC 采样, 以降低噪声并解决低电感问题 将梯形波 BEMF 信号与 VBUS/2 进行比较, 以检测过零点 用择多函数滤波器对比较结果信号进行滤波 以三种不同模式对电机驱动电压进行换相 : - 传统开环控制器 - 传统闭环控制器 - 比例 - 积分 (Proportional-Integral,PI) 闭环控制器这种新的控制方法是一种基于单片 16 位 PIC MCU 或 dspic DSC 器件的解决方案 所需的外部硬件仅为几个电阻, 用来将 BEMF 信号限制在器件 ADC 模块的工作电压范围内 有传感器控制与无传感器控制的对比 由于 BLDC 电机具有尺寸小 可控制性好 效率高的特点, 常用于消费和工业应用中 BLDC 电机还愈来愈多地出现在汽车应用中用来取代传送带和液压系统, 提供额外功能和提高燃油经济性, 同时消除维护成本 由于电励磁必须与转子位置同步, 因此 BLDC 电机在运行时, 通常需要一个或多个转子位置传感器 由于成本 可靠性 机械包装的原因, 特别是当转子在液体中运行时, 电机适宜在无位置传感器的条件下运行, 即通常所说的无传感器运行 通过检测不通电相绕组上的 BEMF 电压可以确定电机驱动电压的换相时间 然而, 无传感器控制也有一些缺点 : 由于 BEMF 足够大时才能被检测到, 因此电机必须运行在最低转速以上 电机负载突变可能引起 BEMF 驱动环失锁如果低成本是应用中关注的主要问题, 且无需电机在低速下运行, 以及预料电机负载不会发生快速地变化, 那么在这种情况下, 无传感器梯形波控制就可能是应用中的较好选择 但某些特定算法能够克服上面所列出的全部缺点 基于以下几个原因, 推荐您采用本文档所述的 BEMF 过零检测技术 : 适用于多种电机类型 理论上, 这种技术可用于星形和三角形连接三相电机 无需详细了解电机参数 对于电机的制造公差差异不太敏感 DS01160B_CN 第 1 页
2 六步 ( 梯形 ) 换相 在该应用笔记所介绍的无传感器算法中, 可以按六步梯形换相或 120 换相的方式对电机绕组进行通电 图 1 显示了六步换相的工作原理 每一步, 即一个扇区, 等于 60 电角度 六个扇区就构成 360 电角度, 即一个电周期 图 1: B +VDC GND +VDC GND 60 2 六步换相 5 A 6 3 绿色绕组 1 4 红色绕组 C 绕组图中的箭头表示六步的每步中电机绕组内电流的流向 下面的曲线图显示了六步的每一步中电机每一绕组端上的反电势波形 六步依次换相推动电机运转一个电周期 六步换相 第 1 步 - 红色绕组正向通电 - 绿色绕组负向通电 - 蓝色绕组断电 第 2 步 - 红色绕组仍正向通电 - 蓝色绕组负向通电 - 绿色绕组断电 第 3 步 - 绿色绕组正向通电 - 蓝色绕组负向通电 - 红色绕组断电 第 4 步 - 绿色绕组正向通电 - 红色绕组负向通电 - 蓝色绕组断电 第 5 步 - 蓝色绕组正向通电 - 红色绕组负向通电 - 绿色绕组断电 第 6 步 - 蓝色绕组正向通电 - 绿色绕组负向通电 - 红色绕组断电 对于每一个扇区, 都有两相绕组通电, 一相绕组断电 实际上, 在每个扇区内都有一相绕组断电是适宜使用无传感器控制算法的六步控制的一个重要特性 +VDC 蓝色绕组 GND 扇区 DS01160B_CN 第 2 页
3 BEMF 的产生和检测 当 BLDC 电机旋转时, 根据楞次定律, 每相绕组都会产生与加到该相绕组上的主电压方向相反的 BEMF 该 BEMF 的极性与通电电压的极性相反 BEMF 主要取决于以下三个电机参数 : 定子绕组匝数 转子角速度 转子磁铁产生的磁场可以采用公式 1 根据电机参数和角速度来计算 BEMF 公式 1: 反电动势 (BEMF) 其中 : BEMF = NlrB N = 每相绕组匝数 l = 转子长度 r = 转子内半径 B = 转子磁场 = 角速度 如果避免了定子的磁饱和, 或者忽略磁场与温度的相关性 ( 即 B 为常数 ), 则惟一变化的项是电机的角速度 因此,BEMF 与转子速度成正比, 速度增加则 BEMF 也增大 扇区的切换频率取决于电机的转速 ; 扇区切换速度越快, 可以达到的机械转速越高 BEMF 电压与转子速度成正比 因此, 在极低转速下通过在 BEMF 为零时检测位置是不可行的 然而, 有许多应用 ( 如风扇和泵 ) 不需要在低速时进行位置控制或闭环操作 对于这些应用, 非常适合采用 BEMF 检测方法 施加到定子上的换相电压对电机的正常工作也有直接的影响 为了进行高效率控制, 所施加电压必须至少足以产生 BEMF, 另外还要加上电机绕组上用于产生转矩的压降 此压降等于绕组阻抗与电流的乘积 一般来说, 如果换相电压设置为最大值, 无论电机转速或产生的转矩如何, 电机的驱动效率将很低, 能量将转换为电机绕组上的热量耗散掉 为实现所需的正确控制, 采用脉宽调制 (Pulse-Width Modulation, PWM) 来获得正确的电压值 PWM 是高效率的电机驱动方法, 但当试图采集控制反馈信号 ( 即 BEMF 电压 ) 时会引入一些噪声问题 BLDC 电机和无传感器控制的重要关系可概括为 : BEMF 信号的幅值和转速成正比 BEMF 信号的频率等于机械转速与极对数的乘积 电机转速与电流成正比 ( 假设电机的温度恒定 ) 电机驱动电压等于 BEMF ( 与转速成正比 ) 加上绕组阻抗压降 ( 与给定转矩对应的电流成正比 ) 过零检测 按照 BLDC 电机控制理论, 为产生最大转矩, 定子的磁通应该比转子磁通超前 90 电角度 因此, 为获得最大转矩, 相电流需要与相 BEMF 电压同相 对于我们所讨论的三相 BLDC 电机, 三相之间的相移为 120, 所以在定子中产生旋转转子磁通的简便方法是我们前面所述的六步换相方案, 三相电压每 60 电角度换相一次 在最大转矩和满载情况下, 忽略电感电抗, 相电流应该与驱动电压具有相同的波形, 且两个信号需要同相, 通过比较图 2( 高电流, 带载 ) 和图 3( 低电流, 空载 ) 可以观察到这一点 图 6 显示了各相的理想 BEMF 波形以及相电流, 假定带载情况下进行高效率换相 BEMF 相电压的中心位于 1/2 驱动电压处 这意味着任何过零事件实际上都指示了 BEMF 波形与 1/2 电源电压 (VBUS/2) 点相交 过零点发生在自最后一次换相结束 30 电角度的地方, 也是距下一次换相点 30 电角度的地方 从而可以通过两次过零事件之间的间隔时间来计算电机转速 识别到当前过零事件时, 就可以实现对将来各步换相的精确调度 一个电周期由六个相等的 60º 部分组成, 每个扇区与其中的一个部分相对应 ( 扇区编号任意 ) 换相发生在每个扇区的边界 因此, 我们需要检测的是扇区的边界 在 BEMF 过零事件与需要换相的位置之间, 有一个 30º 的偏移 DS01160B_CN 第 3 页
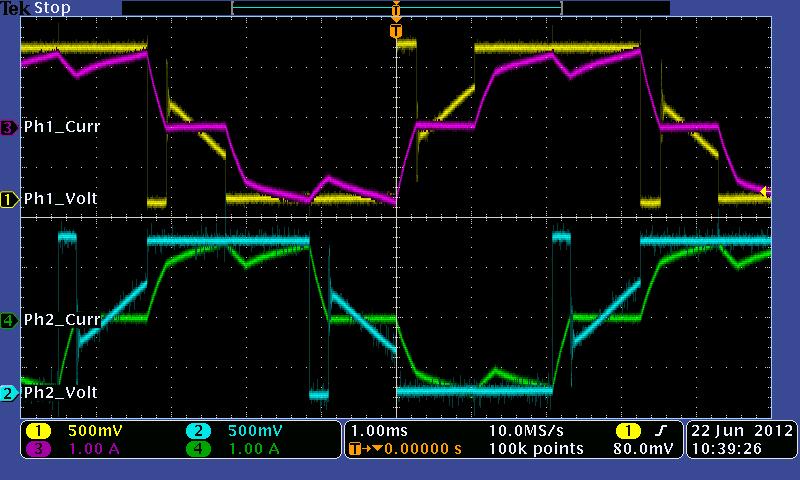

4 图 2: 带载情况下的相电压和相电流 图 3: 过零点发生的确切位置 DS01160B_CN 第 4 页
5 BEMF 过零信号检测 可以使用不同的方法来检测 BEMF 电压过零信号 这一节将介绍其中的两种 所有这些方法都有各自的优缺点, 这将在下一节中讲到 所有这些方法都假定电机的中性点没有用导线引出或者电机定子绕组是三角形连接方式 BEMF 电压与直流母线电压的一半进行比较 该方法是在假定 BEMF 电压等于 VDC/2 时发生过零事件的情况下, 利用比较器将 BEMF 电压与直流母线电压的一半 (VBUS/2) 进行比较 图 4 显示了实现该方法所用的电路 BEMF 电压与电机中性点电压比较 前面介绍的过零检测法可以通过使用可变阈值电压点检测过零事件来加以简化 该可变电压就是电机的中性点 大多数 BLDC 电机的中性点不会用导线引出 但可以用电阻网络来构造中性点 将三个电阻 (RR) 的一端分别与电机的三相绕组并联, 另一端连在一起以产生一个虚拟中性点, 如图 5 所示 图 5: BEMF 电压与虚拟中性点电压进行比较 VBUS A 图 4: VBUS BEMF 电压与 VBUS/2 进行比较 A RR RR BEMF BEMF C GND RR B 虚拟中性点 + _ 至 IC2 GND C B 至 ADC 中性点信号也可通过软件重构, 其值等于三个同时采样的 ADC 通道的平均值 ( 公式 2) 然后将重构的电机虚拟电压与每个 BEMF 信号比较来确定是否发生过零事件 BEMF 信号与电机中性点电压相等时即发生过零事件 GND 公式 2: 虚拟中性点电压与 BEMF 信号的关系 假设电机处于第一个换相步 ( 见图 1), 即 A 相通过一个电子开关与 +VBUS 相连, C 相通过一个电子开关与 GND 相连, 而 B 相开路 就在第二个换相步将要到来时, 从 B 相上观察到的 BEMF 信号的斜率为负, 其最小值接近 +VDC 当第二个换相步发生时, B 相电压达到 GND 值 此时,B 相通过一个电子开关与 GND 相连,C 相开路, 而 A 相仍与 VDC 相连 就在第三个换相步将要到来时, 从 C 相上观察到的 BEMF 信号的斜率为正, 其最大值接近 VDC 为了确定过零事件的发生, 将 B 相和 C 相上观察到的斜率与 VDC/2 进行比较 这种电路易于实现, 将三个运放配置为比较器即可 BEMF A + BEMF B + BEMF C Vn = 其中 : Vn 表示电机中性点电压 BEMF A 表示 A 相 BEMF 电压 BEMF B 表示 B 相 BEMF 电压 BEMF C 表示 C 相 BEMF 电压 DS01160B_CN 第 5 页

6 图 6 显示了在所有三相上测量的 BEMF 信号 图 7 显示了一个完整的 BLDC 控制系统所需的电路 图 6: 所有三相的 BEMF 信号 图 7: 利用 dspic DSC 的 ADC 来检测 BEMF 电压 dspic30f2010 PWM3H PWM3L PWM2H PWM2L PWM1H PWM1L FLTA 故障 三相逆变器 R49 R41 R34 R36 BLDC R44 AN2 AN3 AN4 AN5 期望值 各相端电压反馈 R52 DS01160B_CN 第 6 页
 与电机绕组上施加的电压成 正比 ; 同时高电机转速需要高电压 由于在 PWM 高电平导通状态采样 BEMF 信号,")
7 图 8 显示了在一个扇区 (60 ) 中的采样过程 下面的窗口提供了发生 ADC 采样时的时序的增强视图 ADC_Read 信号表示 ADC 采样 BEMF 电压信号的时刻 请注意, 在所有的 BEMF 衰减斜坡期间, 仅采样周期的前半部分 这是因为一旦检测到过零事件, 将不再进行采样 这允许上层应用程序有更多的时间执行其他重要任务 图 9 和图 10 比较了 ADC 采样和 PWM 占空比之间的差别 采样和转换的速度配置为 ADC 和控制器允许的最快速度 同时, 仅在 PWM 信号的高电平期间采集 BEMF 电压, 因此采样速率和 PWM 频率成正比 如图 9 和图 10 所示, 采样的次数取决于占空比 占空比的值 ( 对应于 PWM 高电平导通状态 ) 与电机绕组上施加的电压成 正比 ; 同时高电机转速需要高电压 由于在 PWM 高电平导通状态采样 BEMF 信号, 可得知高占空比 ( 高转速 ) 意味着发生更多次 ADC 采样 采样次数更多, 则对过零事件的检测更快 更精确, 从而扇区切换也更快 使用 VBUS/2 方法的好处是, 仅需要采样一个 ADC 通道, 而中性点重构方法需要按顺序采样三个通道 这种方法的挑战是, 需要确定采样 BEMF 信号的正确时间, 因为 ADC 采集的采样可能受到 PWM 开关频率产生的谐振跳变电压的影响 ADC 模块配置为在 PWM 导通期间进行采样, 以避免由电子开关产生的振铃噪声以及其他噪声 ( 例如, 当电机绕组断电时产生的高电压尖峰 ) 这些噪声可能产生假的过零事件 图 8: ADC 采样与 PWM 及 BEMF 信号 DS01160B_CN 第 7 页
 图 10:")
 DS01160B_CN 第")
8 图 9: 一个 PWM 周期中的 BEMF 采样 ( 低 PWM 占空比 ) 图 10: 一个 PWM 周期中的 BEMF 采样 ( 高 PWM 占空比 ) DS01160B_CN 第 8 页
9 数字滤波器 ( 择多函数 ) 如前所述,BEMF 信号可能会受到在其他两个通电绕组中 PWM 换相的不利影响 电机参数之间的耦合, 尤其是电感, 可能在与 PWM 换相同步的 BEMF 信号中引起纹波 这种影响在具有集中绕组的电机中不是很明显 产生的纹波可能造成错误换相, 因此有必要对 BEMF 信号进行滤波 理论上有两种滤波方法 : 模拟或数字 模拟滤波的缺点是需要额外增加元件和成本, 相位受频率影响以及幅值变化 BEMF 检测法以名为 择多函数 的非线性数字滤波器为基础 在某些情况下, 它也被称为 中值法 择多函数是一种布尔函数, 它取 n 个二进制数作为输入并返回这些数中出现次数最多的那个数 假如有 3 个布尔输入, 那么它返回的是那个至少出现了两次的数 ( 真或假 ) 在这种情况下, 这两个相等的值占总数的 66% 择多函数总是返回那个占总数的比例为多数 (> 50%) 的数 表 1 给出了一个具有 3 输入的择多函数示例 数值中的多数可以用逻辑运算符 与 (^ ) 和 或 ( v) 来表示, 如公式 3 所示 表 1: 公式 3: 使用 3 个输入的择多函数示例 A B C 大多数 择多函数的布尔表示法 Majority = A B A C B C 用择多函数滤波器对 BEMF 信号进行滤波 这种非线性滤波器的实现是基于一个 6 样本窗口, 其中, 三个最重要的样本中至少有 51% 应该等于 1, 而剩下三个不重要样本应该等于 0, 以识别已数字化的 BEMF 信号中是否发生过零事件 这一步滤波处理使算法功能变得更加强大 执行择多函数的第一步是利用两个逻辑操作符, 其中, 与 操作符用来检测与当前换相状态相对应的当前 BEMF 信号, 异或 (XOR) 操作符用来检测当前 BEMF 信号的下降沿或上升沿 在以下各节中, 将该逻辑运算的输出称为 当前屏蔽的 BEMF 信号 然后, 利用择多检测滤波器来对当前屏蔽的 BEMF 信号进行滤波 该滤波器在实现时, 用到了一个由 64 个数值组成的数组以及一个用于修改下一个数组的指针的特殊逻辑测试条件 该逻辑测试条件还能识别当前屏蔽 BEMF 信号的下降沿和上升沿 ; 这两个沿都能表征为逻辑测试条件输出端的 真到假 事件 该条件的输出还能用作择多检测滤波器的一个输入 这 64 个数值表示 6 样本窗中含有当前屏蔽 BEMF 信号的 2 6 种可能的组合 ; 在查找表中的每个数值都是一个指向随时间变化的下一个信号状态的指针 该滤波器不断地查找逻辑测试条件输出端的 真到假 变化, 如果这个 真到假 的条件被检测到, 滤波器就会查找三个连续的假状态来验证发生的过零事件 一个逻辑测试输出端的 真到假 条件表示一个过零事件, 亦表示电机的一个换相状态, 其在一段延时后发生 该延时等于 30 电角度对应的时间减去执行数字滤波所需要的时间 换相之后, 就该检测下一个 BEMF 信号了 64 个数组值在表 2 中列出 这些数组值可按以下方法计算 ( 公式 4): 前 32 个值的计算方法是用数组元素下标乘以 2 后 32 个值的计算方法是用数组元素下标减去 32, 然后乘以 2 公式 4: 前 32 个值 : 后 32 个值 : 计算数组值 Array Value [N] = N 2 Array Value [N] = N 32 2 DS01160B_CN 第 9 页
10 表 2: 数组值其中, 共有 16 个能够表征 真到假 条件的独特数组元素下标编号 这些编号使用如下择多函数准则, 根据数组元素数组元素下标 [N] 数组值下标 [N] 数组值其 6 位二进制值来选择 : 三个最高有效位 (Most Significant bit, MSb) 中 包含了大多数 1 (> 50%) 三个最低有效位 (Least Significant bit, LSb) 中 包含了大多数 0 (> 50%) 表 3 显示了与这两个条件相匹配的 16 个可能的编号 由这些独特数组元素下标指向的值用 1 来代替, 以表示 真到假 条件的发生 表 3: 能够表征真到假条件的独特编号 编号 6 位二进制表示 DS01160B_CN 第 10 页
11 剩下的 48 个数组编号是指向独特值的指针, 以防真到假条件发生 有些数值从不指向任何一个独特值, 因为它们不是这 16 个独特编号中任何一个的倍数 表 4 给出了一些符合这种条件的编号 表 4: 编号 值为独特编号倍数的编号 然后, 这些编号 ( 从不指向任一个 16 位独特编号 ) 指向其倍数并以滤波器不断等待一个指向独特值的新值的方式陷入循环 表 5 显示了那些其值不是独特值的倍数的编号 完整的滤波器系数数组以及具有独特编号指针的初始数组, 如表 6 所示 表 5: 6 位二进制表示 左移的次数 被指向的独特编号 从不指向独特值的编号 独特编号的 6 位二进制表示 编号 6 位二进制 在变为零前指向的编号 右移的次数 , 4, 8, 16, , 36, 8, 16, , 16, , 4, 8, 16, 32 5 表 6: 数组元素下标 [N] 数组值 全部择多滤波器系数 数组 ( 独特编号 ) 数组元素下标 [N] 数组值 数组 ( 独特编号 ) 表 7 给出了一个完整的滤波过程示例, 其输入是一些用二进制数表示的无噪声的 BEMF 信号 表 8 也给出了一个完整的滤波过程示例, 但其输入是一些用二进制数表示的有噪声的 BEMF 信号 为保持定子磁场超前于转子磁场, 必须在精确的转子位置进行一个扇区到另一个扇区的切换, 才能获得最佳转矩 从过零检测时刻开始, 该换相延迟时间等于 30 电角度对应的时间减去执行数字滤波过程所需要的时间 为了确定这一换相延迟时间, 需使用器件的一个通用定时器来测量两个过零事件之间的时间间隔 DS01160B_CN 第 11 页
12 表 7: 使用无噪声的 BEMF 信号的数字滤波计算示例 电角度 BEMF 相 异或 屏蔽相 与 屏蔽相 C B A C B A C B A 逻辑测试 换相步 滤波器输出 过零事件 与 屏蔽 异或 屏蔽 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 真 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 真 假 DS01160B_CN 第 12 页
13 表 8: 使用有噪声的 BEMF 信号的数字滤波计算示例 电角度 BEMF 相 异或 屏蔽相 与 屏蔽相 C B A C B A C B A 逻辑测试 换相步 滤波器输出 过零事件 与 屏蔽 异或 屏蔽 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 真 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 假 真 假 DS01160B_CN 第 13 页
14 控制环 该应用软件中有三种控制模式可供电机进行无传感器运行时使用 这三种模式为 : 开环 闭环 闭环 (PI 控制器 ) 开环模式 当电机上所带负载在其运行范围内恒定时, 电机转速对所施加电压的响应曲线是线性的 如果电源电压非常稳定, 且转矩负载恒定, 那么电机可在整个速度范围内开环运行 假定进行脉宽调制时, 有效电压与 PWM 占空比线性成比例 那么, 将 PWM 占空比与一个 16 位变量对应起来就可以实现开环控制器 该 16 位变量的值可通过一个电位器来产生, 由 ADC 对电位器进行采样 该模式的框图如图 11 所示 图 11: 期望电压 开环控制 dspic DSC MCPWM BLDC 电机 该模数转换值以 10 位无符号整数的形式进行传送 ; 因此, 这些转换值的取值范围是 为了与 PWM 占空比的范围相匹配, 需要对该转换值进行换算 假定 PWM 频率为 20 khz, 则对于运行速度为 40 MIPS 的单片机,PWM 占空比的取值范围是 0 到 2000 ; 对于运行速度为 70 MIPS 的器件 ( 如 Microchip 的 16 位器件 ), PWM 占空比的取值范围是 0 到 3500 比例 - 积分 (PI) 模式使用 PI 转速控制器来计算电机计算转速和转速期望值之差, 然后进行适当的校正 转速期望值通常由电位器的值设置, 该值需进行换算以满足所期望的转速范围 图 12 显示了转速闭环模式的框图 图 12: 电机期望转速 + - 闭环控制 转速 PI 控制器 电机计算转速 如果已知电机的极对数和每秒钟电转速, 就可以确定电机的转速 对于一台具有两个极对 (4 个极 ) 的电机来说, 需要执行两次六步换相周期才能完成一个完整的机械周期 因此, 可以通过计算六步换相周期的个数, 然后将其与电机的极对数进行比较来计算每秒机械转速 为测量机械转速 (RPM), 采用 Timer2 来测量 30 电角度 如果已知 Timer2 的 N 个节拍对应于 30 电角度, 则可以使用基本的电机控制公式计算出最终的机械 RPM 一旦当前转速计算出来, 就将其与电位器换算值设定的期望转速进行比较 然后计算期望转速与当前转速之间的比例 - 积分误差, 再乘以 PI 常数, 如公式 5 所示 之后对 PI 输出进行换算, 以匹配 PWM 占空比的范围 公式 5: PI 控制器计算 dspic DSC MCPWM 转速误差 = 期望转速 - 当前转速 电机 Integral 积分误差 Error = = 积分误差 Integral + Error 转速误差 + Speed Error PI output 输出 = = k p ( Speed 转速误差 Error) ++ K i ( Integral 积分误差 Error ) 闭环和比例 - 积分 (PI) 模式 闭环模式有两种软件实现方式 传统闭环模式通过增大和减小系统每次运行的占空比来维持恒定转速 DS01160B_CN 第 14 页
: 转子对齐序列 ( 正好 200 ms)")
15 启动序列 电机启动序列分为两个阶段 : 用户可定义线性启动斜坡和持续时间 该启动序列对于所有控制模式都适用 在启动斜坡和持续时间期间, 电机以强制旋转换相运行 在此期间, 不检测 BEMF 对于启动斜坡, 可定义的参数如下 : 斜坡长度 ( 以时间计 ): 斜坡所用的时间 斜坡最终 RPM: 斜坡末端的目标电机转速 斜坡启动占空比 : 用来使电机以强制换相方式旋转的 PWM 占空比持续时间是紧跟在斜坡结束后用于保持电机以强制换相方式旋转所需的时间 在这段时间内, 如果使能了 PI 闭环模式, 则要针对所需转速对 PI 控制器进行调节 对于开环控制, 持续时间应该保持非常短, 因为这段时间不会有任何影响 另外要注意斜坡的斜率通过所附的 Excel 参数调整文件来计算 图 13 中的示波器截屏显示了启动序列 ( 从左到右 ): 转子对齐序列 ( 正好 200 ms) 启动斜坡, 其中包括用于强制换相的持续时间 ( 长达最上面波形图的 60%) 从强制换相切换到闭环 ( 当电流下降到非常低时, 所用时间为不改变显示比例的波形图的大约 60%) 闭环操作 图 13: 启动序列 DS01160B_CN 第 15 页
16 软件概述 图 14 图 15 和图 16 概括了 BLDC 控制算法的流程图 状态机 ( 图 14) 确认以下状态 : STATE_STARTING: 电机启动时的状态 在此状态中执行启动斜坡 STATE_STARTED: 电机在所选模式 ( 开环或闭环模式 ) 下运行 STATE_STOPPING: 发出命令使电机停止的状态 自动切换到 STATE_STOPPED STATE_STOPPED: 电机停止 STATE_FAULT: 当当前故障或停转发生时的状态 这个状态与 STATE_STOPPING 基本相同, 但停止是由于故障而不是用户命令 ADC 中断服务程序 (Interrupt Service Routine,ISR) ( 图 15) 设置预换相状态, 即检测到过零点之后的状态 预换相状态的持续时间为 :30 电角度加上择多滤波器延时, 然后减去相位超前角 在预换相状态期间, ADC 不采样任何信号, CPU 几乎空闲 ( 见图 8, 当 BEMF 电压到达其 1/2 点时 ) 预换相状态清除如图 16 所示 当预换相状态清除时, 发生换相,ADC 在消隐计数器到达预设的宏值后重新开始采样, 整个过程重新开始 PI 闭环控制包括新的 PI 调节程序, 每当持续时间不为零时调用 该程序包含根据输入的实际测量值和参考计算 PI 控制器的输出 ; 直到持续时间结束才施加输出 该过程确保从强制扇区换相到 PI 闭环操作的平滑切换 DS01160B_CN 第 16 页
17 图 14: 应用程序主程序和状态机 Main() 状态机 开始 STATE_STOPPING Stop_Motor() 初始化代码 : - 时钟频率 - PWM 模块 - ADC - 定时器 - RTDM STATE_STARTING 跳转至 PWM ISR 无限循环 STATE_FAULT Stop_Motor() 检查按钮是否按下 STATE_STARTED 改变旋转方向? 是 Stop_Motor() 按钮 1 按下? 是 将状态改变为启动 / 停止 等待电机停止 否 改变旋转方向 是 按钮 2 按下? 以新方向 (Re)Start_Motor() 否 STATE_STOPPED 旋转方向检测 执行状态机 DS01160B_CN 第 17 页
18 图 15: ADC 中断服务程序 ( 无传感器换相 ) 为 ADC 中断设置新的自动触发电平 处于预换相状态? N 采样 BEMF 信号 N 重构电机虚拟中性点电压 是 等待消隐时间? 使用电位器控制? 是 对 BEMF 信号滤波 否 是 检测到过零点? 是 读 DMCI 并设置期望 RPM 读电位器并设置期望 RPM 切换到已启动状态 是 状态为在启动? N 计算平均节拍 Timer2 从 0 计数到 30 并设置预换相状态 计算 RPM 添加相位超前 当转子到达 60 时设置 Timer1 执行中断 退出 ADC ISR 执行 PI 控制环或开环 DS01160B_CN 第 18 页
19 图 16: PWM 和 TIMER1 中断服务程序 PWM 中断服务程序 (20 khz PWM 频率 ) Timer1 中断服务程序 更新延时缓冲区 设置预换相状态为 0 状态为在启动? 是 初始化就绪? 是 Start_Motor() 改变电机扇区和 PWM 改写 否 否 退出 Timer1 ISR 检测到停转? 是 转至 STATE_FAULT Init_Motor() 更新 RTDM 缓冲区 退出 PWM ISR Init_Motor() 为当前旋转方向初始化变量 改变电机扇区和 PWM 改写 Start_Motor() 斜坡结束? 否 检查处于斜坡的哪一点并计算相应延时 等待所需时间, 以使转子对齐到新位置 ( 强制换相旋转, 非堵转 ) 开始建立启动斜坡 是 持续时间结束? 否 调节 PI 等待所需的转子对齐时间 ( 非堵转 ) 开启无传感器控制并退出函数 DS01160B_CN 第 19 页
20 结论 该应用笔记的对象是希望利用这种简单实用的新型 BLCD 控制技术来驱动无传感器 BLCD 电机的开发人员, 这种方法无需使用分立的低通滤波硬件和片外比较器 此外, 这种新的控制方法是一种基于单片 16 位器件的解决方案, 除了需要几个电阻用来将 BEMF 信号限制在 ADC 模块的工作电压范围内之外, 不需要其他外部硬件 该算法使用基于择多检测函数的非线性数字滤波器来检测旋转 BLDC 电机产生的反电动势信号 数字滤波器的使用使得反电动势信号上过零事件的检测更为精确 当过零事件被 dspic DSC 器件检测到时, 它就为算法提供了实现电机绕组换相所需要的信息 精确检测反电动势上的过零事件是实现 BLDC 电机 ( 由六步或梯形换相来驱动 ) 无传感器控制的关键 与使用硬件滤波器或外部比较器的情况相比, 使用数字滤波器所需的硬件少, 从而节省了成本, 减小了 PCB 的体积 参考文献 Valiant, L. (1984), Short Monotone Formulae for the Majority Function, Journal of Algorithms 5: Modern Power Electronics and AC Drives, B. Bose, Prentice Hall PTR, ISBN Electric Motors and Drives, A. Hughes, Heinemann Newnes, ISBN Brushless Permanent Magnet and Reluctance Motor Drives, T. Miller, Oxford Clarendon, ISBN K. Iizuka et. al., Microcomputer Control for Sensorless Brushless Motor, IEEE Transactions on Industrial Applications, Vol. 21, No , pp AN857, Brushless DC Motor Control Made Easy, Microchip Technology Inc., 2002 AN901, dspic30f 在无传感器 BLDC 控制中的应用, Microchip Technology Inc., 2007 AN957, 使用 dspic30f2010 控制带传感器的 BLDC 电机, Microchip Technology Inc., 2005 AN970, Using the PIC18F2431 for Sensorless BLDC Motor Control, Microchip Technology Inc., 2005 AN992, 用 dspic30f2010 控制无传感器 BLDC 电机, Microchip Technology Inc., 2005 AN1017, 使用 dspic30f DSC 实现 PMSM 电机的正弦驱动, Microchip Technology Inc., 2005 AN1078, PMSM 的无传感器磁场定向控制, Microchip Technology Inc., 2007 DS01160B_CN 第 20 页
21 附录 A: 版本 A (2008 年 1 月 ): 版本历史 本文档的初始版本, 作者为 D. Torres 版本 B (2012 年 9 月 ): 由 A. Lita 和 M. Cheles 修订, 介绍仅采用一个 ADC S/H 电路的解决方案, 扩展了算法与具有电机控制 PWM 外设的所有 16 位器件的兼容性 仍旧采用 BEMF 控制方法和择多检测滤波 DS01160B_CN 第 21 页
22 注 : DS01160B_CN 第 22 页
23 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一 目前, 仍存在着恶意 甚至是非法破坏代码保护功能的行为 就我们所知, 所有这些行为都不是以 Microchip 数据手册中规定的操作规范来使用 Microchip 产品的 这样做的人极可能侵犯了知识产权 Microchip 愿与那些注重代码完整性的客户合作 Microchip 或任何其他半导体厂商均无法保证其代码的安全性 代码保护并不意味着我们保证产品是 牢不可破 的 代码保护功能处于持续发展中 Microchip 承诺将不断改进产品的代码保护功能 任何试图破坏 Microchip 代码保护功能的行为均可视为违反了 数字器件千年版权法案 (Digital Millennium Copyright Act) 如果这种行为导致他人在未经授权的情况下, 能访问您的软件或其他受版权保护的成果, 您有权依据该法案提起诉讼, 从而制止这种行为 提供本文档的中文版本仅为了便于理解 请勿忽视文档中包含的英文部分, 因为其中提供了有关 Microchip 产品性能和使用情况的有用信息 Microchip Technology Inc. 及其分公司和相关公司 各级主管与员工及事务代理机构对译文中可能存在的任何差错不承担任何责任 建议参考 Microchip Technology Inc. 的英文原版文档 本出版物中所述的器件应用信息及其他类似内容仅为您提供便利, 它们可能由更新之信息所替代 确保应用符合技术规范, 是您自身应负的责任 Microchip 对这些信息不作任何明示或暗示 书面或口头 法定或其他形式的声明或担保, 包括但不限于针对其使用情况 质量 性能 适销性或特定用途的适用性的声明或担保 Microchip 对因这些信息及使用这些信息而引起的后果不承担任何责任 如果将 Microchip 器件用于生命维持和 / 或生命安全应用, 一切风险由买方自负 买方同意在由此引发任何一切伤害 索赔 诉讼或费用时, 会维护和保障 Microchip 免于承担法律责任, 并加以赔偿 在 Microchip 知识产权保护下, 不得暗中或以其他方式转让任何许可证 QUALITY MANAGEMENT SYSTEM CERTIFIED BY DNV == ISO/TS == 商标 Microchip 的名称和徽标组合 Microchip 徽标 dspic FlashFlex KEELOQ KEELOQ 徽标 MPLAB PIC PICmicro PICSTART PIC 32 徽标 rfpic SST SST 徽标 SuperFlash 和 UNI/O 均为 Microchip Technology Inc. 在美国和其他国家或地区的注册商标 FilterLab Hampshire HI-TECH C Linear Active Thermistor MTP SEEVAL 和 The Embedded Control Solutions Company 均为 Microchip Technology Inc. 在美国的注册商标 Silicon Storage Technology 为 Microchip Technology Inc. 在除美国外的国家或地区的注册商标 Analog-for-the-Digital Age Application Maestro BodyCom chipkit chipkit 徽标 CodeGuard dspicdem dspicdem.net dspicworks dsspeak ECAN ECONOMONITOR FanSense HI-TIDE In-Circuit Serial Programming ICSP Mindi MiWi MPASM MPF MPLAB Certified 徽标 MPLIB MPLINK mtouch Omniscient Code Generation PICC PICC-18 PICDEM PICDEM.net PICkit PICtail REAL ICE rflab Select Mode SQI Serial Quad I/O Total Endurance TSHARC UniWinDriver WiperLock ZENA 和 Z-Scale 均为 Microchip Technology Inc. 在美国和其他国家或地区的商标 SQTP 是 Microchip Technology Inc. 在美国的服务标记 GestIC 和 ULPP 为 Microchip Technology Inc. 的子公司 Microchip Technology Germany II GmbH & Co. & KG 在除美国外的国家或地区的注册商标 在此提及的所有其他商标均为各持有公司所有 , Microchip Technology Inc. 版权所有 ISBN: Microchip 位于美国亚利桑那州 Chandler 和 Tempe 与位于俄勒冈州 Gresham 的全球总部 设计和晶圆生产厂及位于美国加利福尼亚州和印度的设计中心均通过了 ISO/TS-16949:2009 认证 Microchip 的 PIC MCU 与 dspic DSC KEELOQ 跳码器件 串行 EEPROM 单片机外设 非易失性存储器和模拟产品严格遵守公司的质量体系流程 此外, Microchip 在开发系统的设计和生产方面的质量体系也已通过了 ISO 9001:2000 认证 DS01160B_CN 第 23 页
24 全球销售及服务网点 美洲 亚太地区 亚太地区 欧洲 公司总部 Corporate Office 2355 West Chandler Blvd. Chandler, AZ Tel: Fax: 技术支持 : support 网址 : 亚特兰大 Atlanta Duluth, GA Tel: Fax: 波士顿 Boston Westborough, MA Tel: Fax: 芝加哥 Chicago Itasca, IL Tel: Fax: 克里夫兰 Cleveland Independence, OH Tel: Fax: 达拉斯 Dallas Addison, TX Tel: Fax: 底特律 Detroit Farmington Hills, MI Tel: Fax: 印第安纳波利斯 Indianapolis Noblesville, IN Tel: Fax: 洛杉矶 Los Angeles Mission Viejo, CA Tel: Fax: 圣克拉拉 Santa Clara Santa Clara, CA Tel: Fax: 加拿大多伦多 Toronto Mississauga, Ontario, Canada Tel: Fax: 亚太总部 Asia Pacific Office Suites , 37th Floor Tower 6, The Gateway Harbour City, Kowloon Hong Kong Tel: Fax: 中国 - 北京 Tel: Fax: 中国 - 成都 Tel: Fax: 中国 - 重庆 Tel: Fax: 中国 - 杭州 Tel: Fax: 中国 - 香港特别行政区 Tel: Fax: 中国 - 南京 Tel: Fax: 中国 - 青岛 Tel: Fax: 中国 - 上海 Tel: Fax: 中国 - 沈阳 Tel: Fax: 中国 - 深圳 Tel: Fax: 中国 - 武汉 Tel: Fax: 中国 - 西安 Tel: Fax: 中国 - 厦门 Tel: Fax: 中国 - 珠海 Tel: Fax: 台湾地区 - 高雄 Tel: Fax: 台湾地区 - 台北 Tel: Fax: 台湾地区 - 新竹 Tel: Fax: 澳大利亚 Australia - Sydney Tel: Fax: 印度 India - Bangalore Tel: Fax: 印度 India - New Delhi Tel: Fax: 印度 India - Pune Tel: Fax: 日本 Japan - Osaka Tel: Fax: 日本 Japan - Yokohama Tel: Fax: 韩国 Korea - Daegu Tel: Fax: 韩国 Korea - Seoul Tel: Fax: 或 马来西亚 Malaysia - Kuala Lumpur Tel: Fax: 马来西亚 Malaysia - Penang Tel: Fax: 菲律宾 Philippines - Manila Tel: Fax: 新加坡 Singapore Tel: Fax: 泰国 Thailand - Bangkok Tel: Fax: 奥地利 Austria - Wels Tel: Fax: 丹麦 Denmark-Copenhagen Tel: Fax: 法国 France - Paris Tel: Fax: 德国 Germany - Munich Tel: Fax: 意大利 Italy - Milan Tel: Fax: 荷兰 Netherlands - Drunen Tel: Fax: 西班牙 Spain - Madrid Tel: Fax: 英国 UK - Wokingham Tel: Fax: /26/12 DS01160B_CN 第 24 页
untitled
 C 8051 MCU SPI EEPROM Alexandru Valeanu Microchip Technology Inc. Microchip Technology 25XXX EEPROM SPI 25XXX EEPROM SO 25XXX EEPROM 3MHz 20 MHz SPI HOLD 25XXX EEPROM EEPROM MCU HOLD 25XXX EEPROM SPI EEPROM
C 8051 MCU SPI EEPROM Alexandru Valeanu Microchip Technology Inc. Microchip Technology 25XXX EEPROM SPI 25XXX EEPROM SO 25XXX EEPROM 3MHz 20 MHz SPI HOLD 25XXX EEPROM EEPROM MCU HOLD 25XXX EEPROM SPI EEPROM
00872a.book
 从 MCP2510 升 级 至 MCP2515 作 者 : 介 绍 Pat Richards Microchip Technology Inc. 开 发 MCP2510 独 立 CAN 控 制 器 的 初 衷 是 赋 予 CAN 系 统 和 模 块 设 计 人 员 更 多 的 灵 活 性, 允 许 他 们 为 自 己 的 应 用 选 择 最 好 的 处 理 器 使 用 MCP2510 不 会 使 设
从 MCP2510 升 级 至 MCP2515 作 者 : 介 绍 Pat Richards Microchip Technology Inc. 开 发 MCP2510 独 立 CAN 控 制 器 的 初 衷 是 赋 予 CAN 系 统 和 模 块 设 计 人 员 更 多 的 灵 活 性, 允 许 他 们 为 自 己 的 应 用 选 择 最 好 的 处 理 器 使 用 MCP2510 不 会 使 设
untitled
 N1113 8051MU I 2 EEPROM lexandru Valeanu Microchip Technology Inc. Microchip Technology 24XXX EEPROM 2 SL 24XXX EEPROM 24XXX EEPROM I 2 100 khz 1MHz 24XXX EEPROM 2 I 2 EEPROM 128 512 b 100 khz 1MHz 1.7V
N1113 8051MU I 2 EEPROM lexandru Valeanu Microchip Technology Inc. Microchip Technology 24XXX EEPROM 2 SL 24XXX EEPROM 24XXX EEPROM I 2 100 khz 1MHz 24XXX EEPROM 2 I 2 EEPROM 128 512 b 100 khz 1MHz 1.7V
untitled
 MCP3421 SOT23-6 DS51793A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip Microchip Technology
MCP3421 SOT23-6 DS51793A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip Microchip Technology
untitled
 PICkit MCP3422 DS51781A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip Microchip Technology
PICkit MCP3422 DS51781A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip Microchip Technology
41632B.book
 互 补 波 形 发 生 器 (CWG) 可 配 置 逻 辑 单 元 (CLC) 和 数 控 振 荡 器 (NCO) 外 设 技 巧 与 诀 窍 简 介 Microchip 致 力 于 不 断 向 客 户 提 供 体 积 更 小 速 度 更 快 使 用 更 简 便 与 运 行 更 可 靠 的 创 新 产 品 我 们 的 闪 存 PIC MCU 已 广 泛 应 用 于 日 常 生 活 中 从 烟 雾 探
互 补 波 形 发 生 器 (CWG) 可 配 置 逻 辑 单 元 (CLC) 和 数 控 振 荡 器 (NCO) 外 设 技 巧 与 诀 窍 简 介 Microchip 致 力 于 不 断 向 客 户 提 供 体 积 更 小 速 度 更 快 使 用 更 简 便 与 运 行 更 可 靠 的 创 新 产 品 我 们 的 闪 存 PIC MCU 已 广 泛 应 用 于 日 常 生 活 中 从 烟 雾 探
PIC24 MSSP FRM Rev A.book
 58 MSSP 58.1... 58-2 58.2... 58-2 58.3... 58-12 58.4 SPI... 58-13 58.5 I2C... 58-22 58.6 /... 58-58 58.7... 58-58 58.8... 58-59 58.9... 58-60 58.10... 58-61 58 MSSP 2012 Microchip Technology Inc. DS30627A_CN
58 MSSP 58.1... 58-2 58.2... 58-2 58.3... 58-12 58.4 SPI... 58-13 58.5 I2C... 58-22 58.6 /... 58-58 58.7... 58-58 58.8... 58-59 58.9... 58-60 58.10... 58-61 58 MSSP 2012 Microchip Technology Inc. DS30627A_CN
01262B.book
 使用 C30 编译器实现单片机与片外串行 SRAM 的通信 作者 : 引言 Martin Bowman Microchip Technology Inc. 适用于 Microchip 的 dspic DSC 和 PIC24 系列单片机的 C30 编译器为寻址外部存储器提供了一个解决方案 该编译器支持这样的功能, 即允许用户按照访问 MCU 的片内存储器的方式来访问外部存储器 本应用笔记主要介绍如何使用
使用 C30 编译器实现单片机与片外串行 SRAM 的通信 作者 : 引言 Martin Bowman Microchip Technology Inc. 适用于 Microchip 的 dspic DSC 和 PIC24 系列单片机的 C30 编译器为寻址外部存储器提供了一个解决方案 该编译器支持这样的功能, 即允许用户按照访问 MCU 的片内存储器的方式来访问外部存储器 本应用笔记主要介绍如何使用
MCP47x6_DaughterBoard.book
 MCP47X6 PICtail Plus 子 板 用 户 指 南 DS51932B_CN 请 注 意 以 下 有 关 Microchip 器 件 代 码 保 护 功 能 的 要 点 : Microchip 的 产 品 均 达 到 Microchip 数 据 手 册 中 所 述 的 技 术 指 标 Microchip 确 信 : 在 正 常 使 用 的 情 况 下, Microchip 系 列 产 品
MCP47X6 PICtail Plus 子 板 用 户 指 南 DS51932B_CN 请 注 意 以 下 有 关 Microchip 器 件 代 码 保 护 功 能 的 要 点 : Microchip 的 产 品 均 达 到 Microchip 数 据 手 册 中 所 述 的 技 术 指 标 Microchip 确 信 : 在 正 常 使 用 的 情 况 下, Microchip 系 列 产 品
61127c_cn.book
 1 第 1 章 简 介 简 介 目 录 本 章 包 括 下 列 主 题 : 1.1 简 介... 1-2 1.2 本 手 册 的 目 标... 1-2 1.3 器 件 结 构... 1-2 1.4 开 发 支 持... 1-4 1.5 样 式 和 符 号 约 定... 1-4 1.6 相 关 文 档... 1-6 1.7 版 本 历 史... 1-7 2010 Microchip Technology
1 第 1 章 简 介 简 介 目 录 本 章 包 括 下 列 主 题 : 1.1 简 介... 1-2 1.2 本 手 册 的 目 标... 1-2 1.3 器 件 结 构... 1-2 1.4 开 发 支 持... 1-4 1.5 样 式 和 符 号 约 定... 1-4 1.6 相 关 文 档... 1-6 1.7 版 本 历 史... 1-7 2010 Microchip Technology
,Microchip Technology PIC LCD, PIC16F913/914/ 916/917/946 PIC18F6390/6490/8390/8490 PIC16F65J90/85J90 Microchip LCD LCD, Microchip 的优势 LCD PIC, LCD LC
 LCD PIC 单片机解决方案 集成 LCD 驱动器模块的 PIC 单片机 www.microchip.com/lcd ,Microchip Technology PIC LCD, PIC16F913/914/ 916/917/946 PIC18F6390/6490/8390/8490 PIC16F65J90/85J90 Microchip LCD LCD, Microchip 的优势 LCD PIC,
LCD PIC 单片机解决方案 集成 LCD 驱动器模块的 PIC 单片机 www.microchip.com/lcd ,Microchip Technology PIC LCD, PIC16F913/914/ 916/917/946 PIC18F6390/6490/8390/8490 PIC16F65J90/85J90 Microchip LCD LCD, Microchip 的优势 LCD PIC,
Sensorless BLDC Control with Back-EMF Filtering Using a Majority Function
 用择多函数实现反电动势滤波的无传感器 BLDC 控制 作者 : 引言 Daniel Torres Microchip Technology Inc. 本应用笔记介绍一种用 dspic 数字信号控制器 (DSC) 来实现无刷直流 (Brushless Direct Current, BLDC) 电机无传感器控制的算法 该算法利用对反电动势 (Back-Electromotive Force,BEMF)
用择多函数实现反电动势滤波的无传感器 BLDC 控制 作者 : 引言 Daniel Torres Microchip Technology Inc. 本应用笔记介绍一种用 dspic 数字信号控制器 (DSC) 来实现无刷直流 (Brushless Direct Current, BLDC) 电机无传感器控制的算法 该算法利用对反电动势 (Back-Electromotive Force,BEMF)
TB3109 PIC32MX 器件中与 USB 模块相关的更改 USB 模块中断位 ( 即 USBIF USBIE USBIP 和 USBIS 位 ) 的位置变化会影响 PIC32MX 器件上的 USB 协议栈操作 表 1 给出了所列 PIC32MX 器件系列中 USBIF USBIE USBIP
 的位置变化会影响 PIC32MX 器件上的 USB 协议栈操作 表 1 给出了所列 PIC32MX 器件系列中 USBIF USBIE USBIP") 在 v2013-06-15 MLA USB 设备和主机协议栈中更新 PIC32MX 支持 TB3109 简介 我们提供适合 PIC32MX MCU 的 Microchip 应用程序库 (Microchip Libraries for Applications,MLA), 但未计划向 MLA 添加新功能 v2013-06-15 MLA USB 协议栈本质上支持所有适用的 PIC32MX MCU 器件
在 v2013-06-15 MLA USB 设备和主机协议栈中更新 PIC32MX 支持 TB3109 简介 我们提供适合 PIC32MX MCU 的 Microchip 应用程序库 (Microchip Libraries for Applications,MLA), 但未计划向 MLA 添加新功能 v2013-06-15 MLA USB 协议栈本质上支持所有适用的 PIC32MX MCU 器件
untitled
 MCP3421 DS51683A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip Microchip Technology Inc. Microchip
MCP3421 DS51683A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip Microchip Technology Inc. Microchip
工作原理 脉冲血氧仪基于氧合血红蛋白 (HbO 2 ) 和脱氧血红蛋白 (Hb) 的红光 ( 波长为 nm) 和红外光 ( 波长为 nm) 吸收特性来监测人体血液的氧饱和度 (SpO 2 ) 脉冲血氧仪会交替地闪烁红光和红外光, 光线穿过手指到达光电二极管 HbO
 和脱氧血红蛋白 (Hb) 的红光 ( 波长为 nm) 和红外光 ( 波长为 nm) 吸收特性来监测人体血液的氧饱和度 (SpO 2 ) 脉冲血氧仪会交替地闪烁红光和红外光, 光线穿过手指到达光电二极管 HbO") 使用 Microchip 的 dspic 数字信号控制器 (DSC) 和模拟器件实现脉冲血氧仪设计 作者 : Zhang Feng Microchip Technology Inc. 简介 脉冲血氧仪是一种用于监测患者血氧饱和度和心率的非侵入式医疗设备 本应用笔记演示了如何使用 Microchip 的 dspic 数字信号控制器 (Digital Signal Controller, DSC) 和模拟器件来实现高精度脉冲血氧仪
使用 Microchip 的 dspic 数字信号控制器 (DSC) 和模拟器件实现脉冲血氧仪设计 作者 : Zhang Feng Microchip Technology Inc. 简介 脉冲血氧仪是一种用于监测患者血氧饱和度和心率的非侵入式医疗设备 本应用笔记演示了如何使用 Microchip 的 dspic 数字信号控制器 (Digital Signal Controller, DSC) 和模拟器件来实现高精度脉冲血氧仪
CTMU Temperature Measurement AN.book
 利用 PIC MCU 中的 CTMU 测量温度 TB3016 作者 : 最新一代 PIC24F 和 PIC18F 器件包含的充电时间测量单元 (Charge Time Measurement Unit,CTMU) 使用恒流源来计算电容值的变化以及事件的间隔时间 运用半导体物理学的基本原理, 同样的电流源也可用来测量温度 这允许使用普通而廉价的二极管来取代相对昂贵的热敏电阻和温度传感器 本技术简介描述了使用
利用 PIC MCU 中的 CTMU 测量温度 TB3016 作者 : 最新一代 PIC24F 和 PIC18F 器件包含的充电时间测量单元 (Charge Time Measurement Unit,CTMU) 使用恒流源来计算电容值的变化以及事件的间隔时间 运用半导体物理学的基本原理, 同样的电流源也可用来测量温度 这允许使用普通而廉价的二极管来取代相对昂贵的热敏电阻和温度传感器 本技术简介描述了使用
TB3098 PIC16F170X 外设引脚选择 (PPS) 技术简介 作者 : 简介 Stephen Allen Microchip Technology Inc. 外设引脚选择 (Peripheral Pin Select,PPS) 可以使数字外设灵活地映射到各种外部引脚 在过去, 外设硬接线到
 技术简介 作者 : 简介 Stephen Allen Microchip Technology Inc. 外设引脚选择 (Peripheral Pin Select,PPS) 可以使数字外设灵活地映射到各种外部引脚 在过去, 外设硬接线到") PIC16F170X 外设引脚选择 (PPS) 技术简介 作者 : 简介 Stephen Allen Microchip Technology Inc 外设引脚选择 (Peripheral Pin Select,PPS) 可以使数字外设灵活地映射到各种外部引脚 在过去, 外设硬接线到特定引脚 ( 例如 : 引脚 RC5 上的 PWM1 输出 ) PPS 允许开发人员从大量输出引脚中进行选择, 这提供了以下优势
PIC16F170X 外设引脚选择 (PPS) 技术简介 作者 : 简介 Stephen Allen Microchip Technology Inc 外设引脚选择 (Peripheral Pin Select,PPS) 可以使数字外设灵活地映射到各种外部引脚 在过去, 外设硬接线到特定引脚 ( 例如 : 引脚 RC5 上的 PWM1 输出 ) PPS 允许开发人员从大量输出引脚中进行选择, 这提供了以下优势
61146A.book
 PIC32 2008 Microchip Technology Inc. DS61146A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip
PIC32 2008 Microchip Technology Inc. DS61146A_CN Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Microchip Digital Millennium Copyright Act Microchip
70641A.book
 AN1299 调整指南 1.1 配置双电流检测电阻模式 本文档介绍了 AN1299 PMSM 无传感器 FOC 的单电流检测电阻三相电流重构算法 (DS01299A_CN) 中所述算法调整所需的步骤和设置 1. 第一步, 用户需完成 AN1078 中的调整过程, 其中介绍了在具体电机和硬件上运行滑模控制器 (Slide Mode Controller, SMC) 所需的全部步骤 2. 应用运行后,
AN1299 调整指南 1.1 配置双电流检测电阻模式 本文档介绍了 AN1299 PMSM 无传感器 FOC 的单电流检测电阻三相电流重构算法 (DS01299A_CN) 中所述算法调整所需的步骤和设置 1. 第一步, 用户需完成 AN1078 中的调整过程, 其中介绍了在具体电机和硬件上运行滑模控制器 (Slide Mode Controller, SMC) 所需的全部步骤 2. 应用运行后,
光 探 测 应 用 光 探 测 应 用 可 以 使 用 许 多 探 测 器, 例 如 光 电 二 极 管 光 电 晶 体 管 光 敏 电 阻 光 电 管 光 电 倍 增 管 电 荷 耦 合 器 件 等 本 应 用 笔 记 将 重 点 介 绍 光 电 二 极 管, 因 为 它 是 最 常 用 的 光
 用 于 光 探 测 应 用 的 MCP649 运 放 AN494 作 者 : 简 介 Yang Zhen Microchip Technology Inc. 许 多 光 探 测 应 用 中 经 常 使 用 低 输 入 偏 置 运 算 放 大 器 ( 运 放 ), 以 降 低 电 流 误 差 和 提 高 输 出 信 号 的 精 度 以 下 为 典 型 的 光 探 测 应 用 : 烟 雾 探 测 器 火
用 于 光 探 测 应 用 的 MCP649 运 放 AN494 作 者 : 简 介 Yang Zhen Microchip Technology Inc. 许 多 光 探 测 应 用 中 经 常 使 用 低 输 入 偏 置 运 算 放 大 器 ( 运 放 ), 以 降 低 电 流 误 差 和 提 高 输 出 信 号 的 精 度 以 下 为 典 型 的 光 探 测 应 用 : 烟 雾 探 测 器 火
21999a_cn.book
 1.5A 低 电 压 低 静 态 电 流 LDO 稳 压 器 MCP1727 特 性 输 出 电 流 能 力 为 1.5A 输 入 工 作 电 压 范 围 :2.3V 至 6.0V 可 调 输 出 电 压 范 围 :0.8V 至 5.0V 标 准 固 定 输 入 电 压 : - 0.8V 1.2V 1.8V 2.5V 3.0V 3.3V 和 5.0V 可 根 据 需 要 提 供 其 他 固 定 输
1.5A 低 电 压 低 静 态 电 流 LDO 稳 压 器 MCP1727 特 性 输 出 电 流 能 力 为 1.5A 输 入 工 作 电 压 范 围 :2.3V 至 6.0V 可 调 输 出 电 压 范 围 :0.8V 至 5.0V 标 准 固 定 输 入 电 压 : - 0.8V 1.2V 1.8V 2.5V 3.0V 3.3V 和 5.0V 可 根 据 需 要 提 供 其 他 固 定 输
AN1487 DALI 控制装置 作者 : 简介 数字可寻址照明接口 (Digitally Addressable Lighting Interface,DALI) 已成为欧洲应对能源危机的一项标准, 主要针对商业和工业用途 DALI 是 IEC 规范的一部分, 具体与数控可调光荧光镇流
 已成为欧洲应对能源危机的一项标准, 主要针对商业和工业用途 DALI 是 IEC 规范的一部分, 具体与数控可调光荧光镇流") DALI 控制装置 作者 : 简介 数字可寻址照明接口 (Digitally Addressable Lighting Interface,DALI) 已成为欧洲应对能源危机的一项标准, 主要针对商业和工业用途 DALI 是 IEC 60929 规范的一部分, 具体与数控可调光荧光镇流器有关 本文档结合 DALI 通信应用笔记 (AN1465A) (ww1.microchip.com/downloads/cn/appnotes/
DALI 控制装置 作者 : 简介 数字可寻址照明接口 (Digitally Addressable Lighting Interface,DALI) 已成为欧洲应对能源危机的一项标准, 主要针对商业和工业用途 DALI 是 IEC 60929 规范的一部分, 具体与数控可调光荧光镇流器有关 本文档结合 DALI 通信应用笔记 (AN1465A) (ww1.microchip.com/downloads/cn/appnotes/
21928a.book
 PS080, PowerTool 800 开发软件用户指南 2005 Microchip Technology Inc. DS21928A_CN 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一
PS080, PowerTool 800 开发软件用户指南 2005 Microchip Technology Inc. DS21928A_CN 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一
01476A.book
 结合 CLC 和 NCO 实现高分辨率 PWM AN1476 作者 : 简介 Cobus Van Eeden Microchip Technology Inc. 虽然许多应用可以使用分辨率低于 8 位的 PWM, 但是有一些应用 ( 例如灯具调光 ) 由于人眼灵敏度的原因需要较高分辨率 背景 传统的 PWM 使用定时器来生成规则的开关频率 (T PWM ), 然后使用纹波计数器来确定在脉冲结束之前,
结合 CLC 和 NCO 实现高分辨率 PWM AN1476 作者 : 简介 Cobus Van Eeden Microchip Technology Inc. 虽然许多应用可以使用分辨率低于 8 位的 PWM, 但是有一些应用 ( 例如灯具调光 ) 由于人眼灵敏度的原因需要较高分辨率 背景 传统的 PWM 使用定时器来生成规则的开关频率 (T PWM ), 然后使用纹波计数器来确定在脉冲结束之前,
0507A_Auto Tech_Microchip
 汽 车 无 线 安 全 接 入 技 术 解 决 方 案 Youbok Lee 主 任 工 程 师 Willie Fitzgerald 产 品 营 销 总 监 Microchip Technology Inc. 引 言 全 球 汽 车 半 导 体 面 临 极 大 的 市 场 机 会, 而 汽 车 设 计 工 程 师 正 在 应 对 高 性 价 比 的 性 能 增 强 功 耗 小 尺 寸 和 安 全 性
汽 车 无 线 安 全 接 入 技 术 解 决 方 案 Youbok Lee 主 任 工 程 师 Willie Fitzgerald 产 品 营 销 总 监 Microchip Technology Inc. 引 言 全 球 汽 车 半 导 体 面 临 极 大 的 市 场 机 会, 而 汽 车 设 计 工 程 师 正 在 应 对 高 性 价 比 的 性 能 增 强 功 耗 小 尺 寸 和 安 全 性
MRF24WG0MAMB Software Migration
 MRF24WG0MA/MB 软件移植 作者 : 概述 本应用笔记介绍为了从旧版 MRF24WB0MA/MB 软件协议栈移植以包含 MRF24WG0MA/MB 模块, 而必须对现有 MLA 软件协议栈进行的更改 使用入门 Amy Ong Microchip Technology Inc. MRF24WG0MA/MB 驱动程序代码已深度嵌入在 MLA 版本中 宏定义用于区分 MRF24WB0MA/MB
MRF24WG0MA/MB 软件移植 作者 : 概述 本应用笔记介绍为了从旧版 MRF24WB0MA/MB 软件协议栈移植以包含 MRF24WG0MA/MB 模块, 而必须对现有 MLA 软件协议栈进行的更改 使用入门 Amy Ong Microchip Technology Inc. MRF24WG0MA/MB 驱动程序代码已深度嵌入在 MLA 版本中 宏定义用于区分 MRF24WB0MA/MB
21498c_cn.book
 精密温度 - 电压转换器 特性 工作电压范围 : - TC147:2.7V 至 4.4V - TC147A:2.5V 至 5.5V 宽温度测量范围 : - -4 C 至 +125 C 温度转换精度高 : - 在 25 C 时为 ±2 C ( 最大值 ) 线性温度斜率 :1 mv/ C ( 典型值 ) 提供 3 引脚 SOT-23B 封装 低工作电流 : - 35 µa 典型值 应用 移动电话 电源过热关断控制
精密温度 - 电压转换器 特性 工作电压范围 : - TC147:2.7V 至 4.4V - TC147A:2.5V 至 5.5V 宽温度测量范围 : - -4 C 至 +125 C 温度转换精度高 : - 在 25 C 时为 ±2 C ( 最大值 ) 线性温度斜率 :1 mv/ C ( 典型值 ) 提供 3 引脚 SOT-23B 封装 低工作电流 : - 35 µa 典型值 应用 移动电话 电源过热关断控制
MCP Phase Energy Meter Reference Design Using PIC18F2520 Users Guide
 跟踪接口工具包规范 跟踪接口工具包 简介 MPLAB REAL ICE 在线仿真器跟踪接口工具包 (AC2446) 可与具有跟踪连接器的 PIC32 接插模块 (PIM)( 表 1-1) 配合使用 具有跟踪连接器的 PIC32 PIM 支持 PIC32 指令跟踪 请参见仿真器文档了解关于 PIC32 指令跟踪的更多信息 表 1-1: PIC32 PIM 列表 * PIM 编号 PIM 名称 跟踪连接器
跟踪接口工具包规范 跟踪接口工具包 简介 MPLAB REAL ICE 在线仿真器跟踪接口工具包 (AC2446) 可与具有跟踪连接器的 PIC32 接插模块 (PIM)( 表 1-1) 配合使用 具有跟踪连接器的 PIC32 PIM 支持 PIC32 指令跟踪 请参见仿真器文档了解关于 PIC32 指令跟踪的更多信息 表 1-1: PIC32 PIM 列表 * PIM 编号 PIM 名称 跟踪连接器
39697b.book
 第 9 章看门狗定时器 (WDT) 目录 本章包括下列主题 : 9.1 简介...9-2 9.2 WDT 工作原理... 9-3 9.3 寄存器映射... 9-7 9.4 设计技巧... 9-8 9.5 相关应用笔记... 9-9 9.6 版本历史... 9-10 9 看门狗定时器 (WDT) 2010 Microchip Technology Inc. DS39697B_CN 第 9-1 页 PIC24F
第 9 章看门狗定时器 (WDT) 目录 本章包括下列主题 : 9.1 简介...9-2 9.2 WDT 工作原理... 9-3 9.3 寄存器映射... 9-7 9.4 设计技巧... 9-8 9.5 相关应用笔记... 9-9 9.6 版本历史... 9-10 9 看门狗定时器 (WDT) 2010 Microchip Technology Inc. DS39697B_CN 第 9-1 页 PIC24F
21666b.book
 具 有 关 断 功 能 的 80 ma 小 型 CMOS LDO TC1016 特 性 节 省 空 间 的 5 引 脚 SC-70 和 SOT-23 封 装 极 低 的 工 作 电 流, 利 于 延 长 电 池 寿 命 : 典 型 值 53 µa 很 低 的 电 压 差 (Dropout Voltage) 额 定 输 出 电 流 :80 ma 仅 需 一 个 1µF 的 陶 瓷 输 出 电 容 高
具 有 关 断 功 能 的 80 ma 小 型 CMOS LDO TC1016 特 性 节 省 空 间 的 5 引 脚 SC-70 和 SOT-23 封 装 极 低 的 工 作 电 流, 利 于 延 长 电 池 寿 命 : 典 型 值 53 µa 很 低 的 电 压 差 (Dropout Voltage) 额 定 输 出 电 流 :80 ma 仅 需 一 个 1µF 的 陶 瓷 输 出 电 容 高
93004A.book
 用 dspic DSC MCPWM 模块驱动交流感应电机 作者 : Jorge Zambada Microchip Technology Inc. 如图 1 所示, 电机绕组的电感对 PWM 电压源的电流进行滤波 正如下文即将介绍的, 基于该原理我们可利用 PWM 信号产生正弦波来对三相 ACIM 进行通电 引言 本文档概括介绍了采用 dspic3f 电机控制数字信号控制器系列芯片实现的电机控制 PWM
用 dspic DSC MCPWM 模块驱动交流感应电机 作者 : Jorge Zambada Microchip Technology Inc. 如图 1 所示, 电机绕组的电感对 PWM 电压源的电流进行滤波 正如下文即将介绍的, 基于该原理我们可利用 PWM 信号产生正弦波来对三相 ACIM 进行通电 引言 本文档概括介绍了采用 dspic3f 电机控制数字信号控制器系列芯片实现的电机控制 PWM
33023A.book(31001A_cn.fm)
") 1 第 1 章 简 介 简 介 目 录 本 章 包 括 下 面 一 些 主 要 内 容 : 1.1 简 介...1-2 1.2 本 手 册 的 宗 旨... 1-3 1.3 器 件 结 构... 1-4 1.4 开 发 支 持... 1-6 1.5 器 件 种 类... 1-7 1.6 格 式 和 符 号 的 约 定... 1-12 1.7 相 关 文 档... 1-14 1.8 相 关 应 用 笔
1 第 1 章 简 介 简 介 目 录 本 章 包 括 下 面 一 些 主 要 内 容 : 1.1 简 介...1-2 1.2 本 手 册 的 宗 旨... 1-3 1.3 器 件 结 构... 1-4 1.4 开 发 支 持... 1-6 1.5 器 件 种 类... 1-7 1.6 格 式 和 符 号 的 约 定... 1-12 1.7 相 关 文 档... 1-14 1.8 相 关 应 用 笔
00686A.Book
 理解和使用监控电路 AN686 概要 本应用笔记讨论了什么是单片机监控器件, 为什么需要这些器件以及在选择这些器件时需要考虑的一些因素 监控器件属于一个很广的范畴, 它涵盖了上电复位 (Power on Reset,POR) 器件 欠压检测 (Brown-Out Detect,BOD) 器件和看门狗定时器器件 本应用笔记将仅讨论具有 POR 和 BOD 功能的监控器件 监控电路的工作 监控电路可用于几种不同的应用,
理解和使用监控电路 AN686 概要 本应用笔记讨论了什么是单片机监控器件, 为什么需要这些器件以及在选择这些器件时需要考虑的一些因素 监控器件属于一个很广的范畴, 它涵盖了上电复位 (Power on Reset,POR) 器件 欠压检测 (Brown-Out Detect,BOD) 器件和看门狗定时器器件 本应用笔记将仅讨论具有 POR 和 BOD 功能的监控器件 监控电路的工作 监控电路可用于几种不同的应用,
PIC18F65J90/85J90 Product Brief
 采用纳瓦技术内置 LCD 驱动器的 64/80 引脚高性能单片机 单片机的特殊性能 : 闪存程序存储器可承受 1000 次擦写 ( 典型值 ) 闪存数据保存时间为 20 年 ( 典型值 ) 软件控制下可自编程 中断具有优先级 8 x 8 单周期硬件乘法器 扩展的看门狗定时器 (Watchdog Timer, WDT): - 周期从 4 ms 到 131s, 可编程设定 通过两个引脚可进行在线串行编程
采用纳瓦技术内置 LCD 驱动器的 64/80 引脚高性能单片机 单片机的特殊性能 : 闪存程序存储器可承受 1000 次擦写 ( 典型值 ) 闪存数据保存时间为 20 年 ( 典型值 ) 软件控制下可自编程 中断具有优先级 8 x 8 单周期硬件乘法器 扩展的看门狗定时器 (Watchdog Timer, WDT): - 周期从 4 ms 到 131s, 可编程设定 通过两个引脚可进行在线串行编程
电子技术基础 ( 第 版 ) 3. 图解单相桥式整流电路 ( 图 4-1-3) 电路名称电路原理图波形图 整流电路的工作原理 1. 单相半波整流电路 u 1 u u sin t a t 1 u 0 A B VD I A VD R B
 3. 图解单相桥式整流电路 ( 图 4-1-3) 电路名称电路原理图波形图 整流电路的工作原理 1. 单相半波整流电路 u 1 u u sin t a t 1 u 0 A B VD I A VD R B") 直流稳压电源 第 4 章 4.1 整流电路及其应用 学习目标 1. 熟悉单相整流电路的组成, 了解整流电路的工作原理. 掌握单相整流电路的输出电压和电流的计算方法, 并能通过示波器观察整流电路输出电压的波形 3. 能从实际电路中识读整流电路, 通过估算, 能合理选用整流元器件 4.1.1 认识整流电路 1. 图解单相半波整流电路 ( 图 4-1-1) 电路名称电路原理图波形图 4-1-1. 图解单相全波整流电路
直流稳压电源 第 4 章 4.1 整流电路及其应用 学习目标 1. 熟悉单相整流电路的组成, 了解整流电路的工作原理. 掌握单相整流电路的输出电压和电流的计算方法, 并能通过示波器观察整流电路输出电压的波形 3. 能从实际电路中识读整流电路, 通过估算, 能合理选用整流元器件 4.1.1 认识整流电路 1. 图解单相半波整流电路 ( 图 4-1-1) 电路名称电路原理图波形图 4-1-1. 图解单相全波整流电路
01277A_cn.book
 使用 C32 编译器进行串行 SRAM 器件与 PIC32 MCU 的接口设计 作者 : 引言 Pinakin K Makwana Microchip Technology Inc. Microchip 的串行 SRAM 产品线提供了向应用添加附加 RAM 的一种新方法 这些器件采用 8 引脚小型封装以及 SPI 接口, 使设计人员提升系统的灵活性 Microchip Technology 的 23XXXX
使用 C32 编译器进行串行 SRAM 器件与 PIC32 MCU 的接口设计 作者 : 引言 Pinakin K Makwana Microchip Technology Inc. Microchip 的串行 SRAM 产品线提供了向应用添加附加 RAM 的一种新方法 这些器件采用 8 引脚小型封装以及 SPI 接口, 使设计人员提升系统的灵活性 Microchip Technology 的 23XXXX
目录 简介 概念 解决方案 / 实现 相关资源... 7 Microchip 网站... 8 变更通知客户服务... 8 客户支持... 8 Microchip 器件代码保护功能... 8 法律声明... 9 商标... 9 DNV 认证的质量管理体系
 什么是 ICM? 如何将 ICM 用于加密 简介 完整性检查监控器 (Integrity Check Monitor,ICM) 是一个 DMA 控制器, 可使用 Cortex M7 MCU 内存 (ICM 描述符区 ) 中的传输描述符在多个存储区上执行哈希计算 ICM 集成了用于哈希的安全哈希算法 (Secure Hash Algorithm,SHA) 引擎 基于 SHA 的哈希适合用于密码验证 质询哈希身份验证
什么是 ICM? 如何将 ICM 用于加密 简介 完整性检查监控器 (Integrity Check Monitor,ICM) 是一个 DMA 控制器, 可使用 Cortex M7 MCU 内存 (ICM 描述符区 ) 中的传输描述符在多个存储区上执行哈希计算 ICM 集成了用于哈希的安全哈希算法 (Secure Hash Algorithm,SHA) 引擎 基于 SHA 的哈希适合用于密码验证 质询哈希身份验证
93001A.book
 使用 dspic30f 器件实现 BLDC 电机控制入门 作者 : 引言 Stan D Souza Microchip Technology Inc. 由于直流无刷 (BLDC) 电机可降低能耗及维护成本, 因此在对效率和可靠性要求较高的应用场合 BLDC 电机正重新受到关注 在大量应用中, dspic30f 电机控制芯片是多种类型 BLDC 电机的理想驱动和控制器件 Microchip 已经开发了许多基于
使用 dspic30f 器件实现 BLDC 电机控制入门 作者 : 引言 Stan D Souza Microchip Technology Inc. 由于直流无刷 (BLDC) 电机可降低能耗及维护成本, 因此在对效率和可靠性要求较高的应用场合 BLDC 电机正重新受到关注 在大量应用中, dspic30f 电机控制芯片是多种类型 BLDC 电机的理想驱动和控制器件 Microchip 已经开发了许多基于
SMSC LAN8700 Datasheet
 Microchip LAN9252 SDK 与 Beckhoff EtherCAT SSC 集成 AN1916 作者 : Kansal Mariam Banu Shaick Ibrahim Microchip Technology Inc. 简介 Microchip LAN9252 是一款集成双以太网 PHY 的 2/3 端口 EtherCAT 从控制器 (EtherCAT Slave Controller,ESC)
Microchip LAN9252 SDK 与 Beckhoff EtherCAT SSC 集成 AN1916 作者 : Kansal Mariam Banu Shaick Ibrahim Microchip Technology Inc. 简介 Microchip LAN9252 是一款集成双以太网 PHY 的 2/3 端口 EtherCAT 从控制器 (EtherCAT Slave Controller,ESC)
物理传感器布线设计 基本设计要素包括传感器的尺寸 传感器相对于接地层和 / 或其他低阻抗走线的位置, 以及 mtouch/righttouch 器件中的具体设置 在遵守几个简单准则的前提下, 可以对器件进行独特的设计, 来检测用户接近或附近金属物体和高介电常数物体的移动 要实现具有高信号强度和低噪声
 Microchip 电容式接近检测设计指南 AN1492 作者 : 简介 Xiang Gao Microchip Technology Inc. 接近检测为用户提供了一种无需物理接触即可与电子设备进行交互的新方法 该技术可提升产品美感, 改进用户体验并降低功耗 为实现接近检测, 人们已使用了许多方法 : 电磁 IR 光学 多普勒效应 电感和电容 每种方法均有各自的优势和局限性 电容传感方法的原理是检测传感器上由于用户触摸或接近而产生的电容变化
Microchip 电容式接近检测设计指南 AN1492 作者 : 简介 Xiang Gao Microchip Technology Inc. 接近检测为用户提供了一种无需物理接触即可与电子设备进行交互的新方法 该技术可提升产品美感, 改进用户体验并降低功耗 为实现接近检测, 人们已使用了许多方法 : 电磁 IR 光学 多普勒效应 电感和电容 每种方法均有各自的优势和局限性 电容传感方法的原理是检测传感器上由于用户触摸或接近而产生的电容变化
「兆豐商業銀行」原交通銀行客戶重要權益手冊
 行 益 行 95 年 8 錄 1 1 參 4 6 金 7 陸 金 7 7 8 錄 行 行 18 錄 行 行 19 行 行 益 行 行 行 95.8.21 行 行 Mega International Commercial Bank Co., Ltd. 行 017 北 路 123 金 樓 行 不 行 行 行 行 行 更 行 更 行 連 參 錄 不 益 益 不 利 行 行 利 不 行 www.ctnbank.com.tw
行 益 行 95 年 8 錄 1 1 參 4 6 金 7 陸 金 7 7 8 錄 行 行 18 錄 行 行 19 行 行 益 行 行 行 95.8.21 行 行 Mega International Commercial Bank Co., Ltd. 行 017 北 路 123 金 樓 行 不 行 行 行 行 行 更 行 更 行 連 參 錄 不 益 益 不 利 行 行 利 不 行 www.ctnbank.com.tw
00975A.book
 使用 MSSP 模块进行 Microwire 串行 EEPROM 与 PIC16 器件的接口设计 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. 目前市场上有许多种单片机用在嵌入式控制系统设计中, 这些嵌入式控制系统中的很大一部分都要用到非易失性存储器 由于串行 EEPROM 具有封装尺寸小, 存储容量灵活, 对 I/O 引脚要求低, 和低功耗低成本等特点,
使用 MSSP 模块进行 Microwire 串行 EEPROM 与 PIC16 器件的接口设计 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. 目前市场上有许多种单片机用在嵌入式控制系统设计中, 这些嵌入式控制系统中的很大一部分都要用到非易失性存储器 由于串行 EEPROM 具有封装尺寸小, 存储容量灵活, 对 I/O 引脚要求低, 和低功耗低成本等特点,
800 mA Fixed-Output CMOS LDO with Shutdown
 I 2 C 7/8-7 128 129-8 256 257 4 R AB - 5 kω - 1 kω - 5 kω - 1 kω 75Ω - 5 ppm -7 C - 15 ppm I 2 C - 1 khz - 4 khz - 3.4 MHz / TCON 1.5V 2.5 ua 12.5V SCL SDA - 2.7V 5.5V - 1.8V 5.5V -3 db 2 MHz 5. kω -4
I 2 C 7/8-7 128 129-8 256 257 4 R AB - 5 kω - 1 kω - 5 kω - 1 kω 75Ω - 5 ppm -7 C - 15 ppm I 2 C - 1 khz - 4 khz - 3.4 MHz / TCON 1.5V 2.5 ua 12.5V SCL SDA - 2.7V 5.5V - 1.8V 5.5V -3 db 2 MHz 5. kω -4
2.0 MHz, 500 mA Synchronous Buck Regulator
 2.0 MHz 500 ma 同 步 降 压 稳 压 器 MCP1603 特 性 典 型 效 率 大 于 90% 输 出 电 流 最 高 为 500 ma 低 静 态 电 流 = 45 µa ( 典 型 值 ) 低 关 断 电 流 = 0.1 µa ( 典 型 值 ) 可 调 输 出 电 压 : - 0.8V 至 4.5V 固 定 输 出 电 压 : - 1.2V 1.5V 1.8V 2.5V 和
2.0 MHz 500 ma 同 步 降 压 稳 压 器 MCP1603 特 性 典 型 效 率 大 于 90% 输 出 电 流 最 高 为 500 ma 低 静 态 电 流 = 45 µa ( 典 型 值 ) 低 关 断 电 流 = 0.1 µa ( 典 型 值 ) 可 调 输 出 电 压 : - 0.8V 至 4.5V 固 定 输 出 电 压 : - 1.2V 1.5V 1.8V 2.5V 和
RW Focus Asia Whitepaper CH1029
 F CUSASIA 1 Robert Walters Focus Asia Whitepaper Matthew Bennett Robert Walters 2 03 04 06 08 10 13 13 14 3 4 5 Robert Walters Focus Asia Whitepaper 6 7 Robert Walters Focus Asia Whitepaper 8 9 Robert
F CUSASIA 1 Robert Walters Focus Asia Whitepaper Matthew Bennett Robert Walters 2 03 04 06 08 10 13 13 14 3 4 5 Robert Walters Focus Asia Whitepaper 6 7 Robert Walters Focus Asia Whitepaper 8 9 Robert
图 1 给出了 WWDT 的框图 为确保在最坏情况下能够通过程序主循环, 需要为定时器设置延时 定时器可通过控制寄存器进行配置 在定时器达到其设定的最大计数值并发生上溢前, 用户的应用程序应定期发出 CLRWDT 指令 如果用户的应用程序未能成功通过 CLRWDT 指令复位定时器, 则看门狗将发生上
 PIC 单片机的窗口看门狗定时器 TB3123 作者 : Ashutosh Tiwari Microchip Technology Inc. 简介 窗口看门狗定时器 (Windowed Watchdog Timer, WWDT) 是 PIC 单片机的增强型看门狗定时器 该定时器是 PIC 单片机现有看门狗定时器 (Watchdog Timer, WDT) 的扩展 Microchip 的 WDT 具有可配置的时间阈值上限和固定的时间阈值下限
PIC 单片机的窗口看门狗定时器 TB3123 作者 : Ashutosh Tiwari Microchip Technology Inc. 简介 窗口看门狗定时器 (Windowed Watchdog Timer, WWDT) 是 PIC 单片机的增强型看门狗定时器 该定时器是 PIC 单片机现有看门狗定时器 (Watchdog Timer, WDT) 的扩展 Microchip 的 WDT 具有可配置的时间阈值上限和固定的时间阈值下限
00966A.book
 SPI 串行 EEPROM 与 PICmicro 单片机的接口设计 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. 目前市场上有许多种单片机用在嵌入式控制系统设计中, 这些嵌入式控制系统中的很大一部分都要用到非易失性存储器 由于串行 EEPROM 具有封装尺寸小, 存储容量灵活, 对 I/O 引脚要求低, 和低功耗低成本等特点, 已成为非易失性存储器的首选
SPI 串行 EEPROM 与 PICmicro 单片机的接口设计 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. 目前市场上有许多种单片机用在嵌入式控制系统设计中, 这些嵌入式控制系统中的很大一部分都要用到非易失性存储器 由于串行 EEPROM 具有封装尺寸小, 存储容量灵活, 对 I/O 引脚要求低, 和低功耗低成本等特点, 已成为非易失性存储器的首选
Using Microchip’s Micropower LDOs
 使用 Microchip 的微功率 LDO AN765 作者 : 简介 Paul Paglia, 公式 1: Microchip Technology Inc. = V REF [( ) 1] V REF = 1.20V Microchip Technology, Inc 的微功率 LDO 系列采用低电压 CMOS 工艺技术 这些 LDO 提供与双极型稳压器类似的纹波抑制和压差特性, 但效率却显著提高了
使用 Microchip 的微功率 LDO AN765 作者 : 简介 Paul Paglia, 公式 1: Microchip Technology Inc. = V REF [( ) 1] V REF = 1.20V Microchip Technology, Inc 的微功率 LDO 系列采用低电压 CMOS 工艺技术 这些 LDO 提供与双极型稳压器类似的纹波抑制和压差特性, 但效率却显著提高了
00992A.book
 用 dspic30f2010 控制无传感器 BLDC 电机 AN992 作者 : 概述 Stan D Souza Microchip Technology 本应用笔记介绍了如何使用 dspic30f2010 数字信号控制器控制无传感器的 BLDC 电机 应用中采用的技术是基于另一 Microchip 应用笔记 : dspic30f 在无传感器 BLDC 控制中的应用 (AN901) 本文介绍了如何将
用 dspic30f2010 控制无传感器 BLDC 电机 AN992 作者 : 概述 Stan D Souza Microchip Technology 本应用笔记介绍了如何使用 dspic30f2010 数字信号控制器控制无传感器的 BLDC 电机 应用中采用的技术是基于另一 Microchip 应用笔记 : dspic30f 在无传感器 BLDC 控制中的应用 (AN901) 本文介绍了如何将
00513D_CN.FM
 使用 PIC16C54 实现模数转换 AN513 作者 : 简介 本应用笔记介绍了一种使用 PIC16C5X 系列单片机实现模数转换 (Analog to Digital,A/D) 的方法 仅需 5 个外部元件即可实现该转换器, 且可通过软硬件配置使转换分辩率达到 6 到 10 位且转换时间不短于 250 µs 这一方法可用于电压和电流转换且使用软件校准技术来补偿由于时间和温度漂移以及元件误差造成的精度误差
使用 PIC16C54 实现模数转换 AN513 作者 : 简介 本应用笔记介绍了一种使用 PIC16C5X 系列单片机实现模数转换 (Analog to Digital,A/D) 的方法 仅需 5 个外部元件即可实现该转换器, 且可通过软硬件配置使转换分辩率达到 6 到 10 位且转换时间不短于 250 µs 这一方法可用于电压和电流转换且使用软件校准技术来补偿由于时间和温度漂移以及元件误差造成的精度误差
01018A.book
 使用 C18 编译器进行 SPI 串行 EEPROM 与 PIC18 单片机的接口设计 作者 : 引言 Chris Parris Microchip Technology Inc. Microchip Technology 生产的 25XXX 系列串行 EEPROM 兼容 SPI 通信标准, 最大时钟频率范围从 3MHz 到 20 MHz 许多时候, 在设计利用串行 EEPROM 器件的应用时, 使用非专用
使用 C18 编译器进行 SPI 串行 EEPROM 与 PIC18 单片机的接口设计 作者 : 引言 Chris Parris Microchip Technology Inc. Microchip Technology 生产的 25XXX 系列串行 EEPROM 兼容 SPI 通信标准, 最大时钟频率范围从 3MHz 到 20 MHz 许多时候, 在设计利用串行 EEPROM 器件的应用时, 使用非专用
Application Note Transient Voltage Suppressors (TVS) for 表 1 VISHAY 的 SM6T 系列的电特性 25 C 型号 击穿电压 器件标识码 V BR AT I T I T 测试电流 (ma) 关态电压 V RM 漏电流 I RM AT V
 for 表 1 VISHAY 的 SM6T 系列的电特性 25 C 型号 击穿电压 器件标识码 V BR AT I T I T 测试电流 (ma) 关态电压 V RM 漏电流 I RM AT V") VISHAY GE NERAL SEMICONDUCTOR 瞬态电压抑制器 应用笔记 用于汽车电子保护的瞬态电压抑制器 (TVS) Soo Man (Sweetman) Kim, Vishay I) TVS 的重要参数 TVS 功率等级 TVS Vishay TVS 10 μs/1000 μs (Bellcore 1089) 1 TVS ESD 8 μs/20 μs 2 1 10 µs 10 µs/1000
VISHAY GE NERAL SEMICONDUCTOR 瞬态电压抑制器 应用笔记 用于汽车电子保护的瞬态电压抑制器 (TVS) Soo Man (Sweetman) Kim, Vishay I) TVS 的重要参数 TVS 功率等级 TVS Vishay TVS 10 μs/1000 μs (Bellcore 1089) 1 TVS ESD 8 μs/20 μs 2 1 10 µs 10 µs/1000
先进制造技术是近几年提得较多,叫得较响的一个专用词语,而且先进制造技术在机械制造业领域中的应用越来越广泛而深入,并取得了很大的成绩
 21 世 纪 全 国 高 校 应 用 人 才 培 养 旅 游 类 规 划 教 材 中 国 公 民 出 境 旅 游 目 的 地 国 家 ( 地 区 ) 概 况 方 海 川 主 编 付 景 保 副 主 编 内 容 简 介 中 国 公 民 出 境 旅 游 目 的 地 国 家 ( 地 区 ) 概 况 一 书 共 分 5 章, 第 1 章 主 要 介 绍 有 关 中 国 出 境 旅 游 市 场 的 发 展 历
21 世 纪 全 国 高 校 应 用 人 才 培 养 旅 游 类 规 划 教 材 中 国 公 民 出 境 旅 游 目 的 地 国 家 ( 地 区 ) 概 况 方 海 川 主 编 付 景 保 副 主 编 内 容 简 介 中 国 公 民 出 境 旅 游 目 的 地 国 家 ( 地 区 ) 概 况 一 书 共 分 5 章, 第 1 章 主 要 介 绍 有 关 中 国 出 境 旅 游 市 场 的 发 展 历
01236B.book
 使用 C3 和定时器连接 dspic33 DSC 和 PIC24 MCU 与兼容 UNI/O 总线的串行 EEPROM 作者 : 简介 Martin Kvasnicka Microchip Technology Inc. 随着嵌入式系统小型化的趋势, 市场对于减少器件间通信所用 I/O 引脚数的需求也与日俱增 Microchip 开发的 UNI/O 总线正满足了这一需求, 这一个低成本且易于实现的解决方案,
使用 C3 和定时器连接 dspic33 DSC 和 PIC24 MCU 与兼容 UNI/O 总线的串行 EEPROM 作者 : 简介 Martin Kvasnicka Microchip Technology Inc. 随着嵌入式系统小型化的趋势, 市场对于减少器件间通信所用 I/O 引脚数的需求也与日俱增 Microchip 开发的 UNI/O 总线正满足了这一需求, 这一个低成本且易于实现的解决方案,
电阻式温度检测器 (RTD) 参考设计 2013 Microchip Technology Inc. DS51891A_CN
 参考设计 2013 Microchip Technology Inc. DS51891A_CN") 电阻式温度检测器 (RTD) 参考设计 2013 Microchip Technology Inc. DS51891A_CN 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一 目前, 仍存在着恶意
电阻式温度检测器 (RTD) 参考设计 2013 Microchip Technology Inc. DS51891A_CN 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一 目前, 仍存在着恶意
 器之 间 向一致时为正 相反时则为负 ③大量电荷的定向移动形成电 流 单个电荷的定向移动同样形成电流 3 电势与电势差 1 陈述概念 电场中某点处 电荷的电势能 E p 与电荷量 q Ep 的比值叫做该点处的电势 表达式为 V 电场中两点之间的 q 电势之差叫做电势差 表达式为 UAB V A VB 2 理解概念 电势差是电场中任意两点之间的电势之差 与参考点的选择无关 电势是反映电场能的性质的物理量
器之 间 向一致时为正 相反时则为负 ③大量电荷的定向移动形成电 流 单个电荷的定向移动同样形成电流 3 电势与电势差 1 陈述概念 电场中某点处 电荷的电势能 E p 与电荷量 q Ep 的比值叫做该点处的电势 表达式为 V 电场中两点之间的 q 电势之差叫做电势差 表达式为 UAB V A VB 2 理解概念 电势差是电场中任意两点之间的电势之差 与参考点的选择无关 电势是反映电场能的性质的物理量
93002A.book
 使用 QEI 模块测量速度和位置 GS002 作者 : 引言 本文档给出了电机控制系列 dspic30f 数字信号控制器中正交编码器 (Quadrature Encoder Interface, QEI) 模块的概述 还提供了一个需要测量转子速度和位置的典型电机控制应用的代码示例 QEI 模块 Jorge Zambada Microchip Technology Inc. 正交编码器 ( 又称增量式编码器或光电式编码器
使用 QEI 模块测量速度和位置 GS002 作者 : 引言 本文档给出了电机控制系列 dspic30f 数字信号控制器中正交编码器 (Quadrature Encoder Interface, QEI) 模块的概述 还提供了一个需要测量转子速度和位置的典型电机控制应用的代码示例 QEI 模块 Jorge Zambada Microchip Technology Inc. 正交编码器 ( 又称增量式编码器或光电式编码器
Rotork E120E IQ brochure
 Rotork IQ IQ IQ 3 7 IP68(3-8 )NEMA 9 6 11 IQ 12 1 16 18 Rotork Controls Ltd, Bath, UK 2 Rotork Controls Inc, Rochester, USA IQ IQ IQ PCIQ-Insight IQ IQ IQ IP67 IQ - EEx ia IIC T ( ) Insight IrDA TM 9 (RS232-IrDA
Rotork IQ IQ IQ 3 7 IP68(3-8 )NEMA 9 6 11 IQ 12 1 16 18 Rotork Controls Ltd, Bath, UK 2 Rotork Controls Inc, Rochester, USA IQ IQ IQ PCIQ-Insight IQ IQ IQ IP67 IQ - EEx ia IIC T ( ) Insight IrDA TM 9 (RS232-IrDA
70640A.book
 AN1292 调整指南 1.1 设置软件参数 本文档介绍了使用 AN1292 利用 PLL 估算器和弱磁技术 (FW) 实现永磁同步电机 (PMSM) 的无传感器磁场定向控制 (FOC) (DS01292A_CN) 中所述的算法来运行电机的分步过程 文件中定义了所有的主要可配置参数 使用 tuning_params.xls Excel 电子表格 ( 见图 1-1) 将参数修改为内部数值格式 此文件包含在
AN1292 调整指南 1.1 设置软件参数 本文档介绍了使用 AN1292 利用 PLL 估算器和弱磁技术 (FW) 实现永磁同步电机 (PMSM) 的无传感器磁场定向控制 (FOC) (DS01292A_CN) 中所述的算法来运行电机的分步过程 文件中定义了所有的主要可配置参数 使用 tuning_params.xls Excel 电子表格 ( 见图 1-1) 将参数修改为内部数值格式 此文件包含在
_LIT MAN USR LX380-L-CHI
 103-009100-01 103-017101-01* * 2 Rev. 1 4 0.7' (20 cm) 1.5' (50 cm) 3' (1 m) 1.5' (50 cm) 10 5 6 7 10 10 10 10 10 10 8 9 10 11 12 13 14 15 II 1 2 3 16 1 2 17 1 2 3 18 1 2 1 2 3 19 32.8' (10.0m) 22.0' (6.7m)
103-009100-01 103-017101-01* * 2 Rev. 1 4 0.7' (20 cm) 1.5' (50 cm) 3' (1 m) 1.5' (50 cm) 10 5 6 7 10 10 10 10 10 10 8 9 10 11 12 13 14 15 II 1 2 3 16 1 2 17 1 2 3 18 1 2 1 2 3 19 32.8' (10.0m) 22.0' (6.7m)
第 5 卷第 9 期 3 9 年 月 电力电容器与无功补偿 &+ 1 ) + ; & ).& &+ 1 & / ) 5 93 & 9 *67893: + 99: 单相 谐波补偿电流对直流侧电压和电流纹波的影响分析!"#$%&'!"#$%&' '& ( ')*&+,& '(-./01 &
 + ; & ).& &+ 1 & / ) 5 93 & 9 *67893: + 99: 单相 谐波补偿电流对直流侧电压和电流纹波的影响分析!#$%&'!#$%&' '& ( ')*&+,& '(-./01 &") 第 5 卷第 9 期 3 9 年 月 电力电容器与无功补偿 &+ 1)+ ; &).& &+ 1&/) 593 & 9 *67893:+99: 单相 谐波补偿电流对直流侧电压和电流纹波的影响分析!#$%&'!#$%&''&(')*&+,& '(-./01&+ -2 3456-78&9:;'& &'
第 5 卷第 9 期 3 9 年 月 电力电容器与无功补偿 &+ 1)+ ; &).& &+ 1&/) 593 & 9 *67893:+99: 单相 谐波补偿电流对直流侧电压和电流纹波的影响分析!#$%&'!#$%&''&(')*&+,& '(-./01&+ -2 3456-78&9:;'& &'
01096B.book
 使用 C30 编译器进行 SPI 串行 EEPROM 与 dspic33f 和 PIC24F 的接口设计 AN1096 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. Microchip 的 25XXX 系列串行 EEPROM 均与 SPI 兼容, 其最大时钟频率在 3 MHz 到 20 MHz 的范围内 许多时候, 当设计利用串行 EEPROM
使用 C30 编译器进行 SPI 串行 EEPROM 与 dspic33f 和 PIC24F 的接口设计 AN1096 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. Microchip 的 25XXX 系列串行 EEPROM 均与 SPI 兼容, 其最大时钟频率在 3 MHz 到 20 MHz 的范围内 许多时候, 当设计利用串行 EEPROM
MASTERs 06 Slide Template
 2009 Microchip Technology Incorporated. 版权所有 C10L08 BAT 第 1 页 C10L08 BAT 便携式产品中的电池管理策略 课程目标 完成课程后, 你将了解到 : 不同化学电池的基本原理和如何在便携式设计中进行应用 针对应用选择合理的电池管理 便携式电源的新趋势以及选择拓扑结构的关键因素 2009 Microchip Technology Incorporated.
2009 Microchip Technology Incorporated. 版权所有 C10L08 BAT 第 1 页 C10L08 BAT 便携式产品中的电池管理策略 课程目标 完成课程后, 你将了解到 : 不同化学电池的基本原理和如何在便携式设计中进行应用 针对应用选择合理的电池管理 便携式电源的新趋势以及选择拓扑结构的关键因素 2009 Microchip Technology Incorporated.
 吉林大学学报 工学版 244 第 4 卷 复杂 鉴于本文篇幅所限 具体公式可详见参考文 献 7 每帧的动力学方程建立及其解算方法如图 3 所示 图4 滚转角速度与输入量 η 随时间的变化波形 Fig 4 Waveform of roll rate and input η with time changing 图5 Fig 5 滚转角随时间的变化波形 Waveform of roll angle with
吉林大学学报 工学版 244 第 4 卷 复杂 鉴于本文篇幅所限 具体公式可详见参考文 献 7 每帧的动力学方程建立及其解算方法如图 3 所示 图4 滚转角速度与输入量 η 随时间的变化波形 Fig 4 Waveform of roll rate and input η with time changing 图5 Fig 5 滚转角随时间的变化波形 Waveform of roll angle with
MPLAB X IDE 和 软 件 工 具 简 介 Microchip 生 产 约 900 种 不 同 的 开 发 工 具, 本 文 档 仅 重 点 介 绍 其 中 一 些 精 选 工 具 关 于 Microchip 开 发 工 具 的 完 整 列 表, 请 访 问
 开发工具 Microchip开发工具快速指南 www.microchip.com/tools MPLAB X IDE 和 软 件 工 具 简 介 Microchip 生 产 约 900 种 不 同 的 开 发 工 具, 本 文 档 仅 重 点 介 绍 其 中 一 些 精 选 工 具 关 于 Microchip 开 发 工 具 的 完 整 列 表, 请 访 问 www.microchip.com/dts
开发工具 Microchip开发工具快速指南 www.microchip.com/tools MPLAB X IDE 和 软 件 工 具 简 介 Microchip 生 产 约 900 种 不 同 的 开 发 工 具, 本 文 档 仅 重 点 介 绍 其 中 一 些 精 选 工 具 关 于 Microchip 开 发 工 具 的 完 整 列 表, 请 访 问 www.microchip.com/dts
模拟外设 : 10 位模数转换器 (Analog-to-Digital Converter, ): - 最多 17 路外部通道 - 可在休眠模式下进行转换 : - 最多 2 个 - 低功耗 / 高速模式 - ( 同相 ) 反相输入上的固定电压参考 - 可从外部访问输出 5 位数模转换器 (Digit
: - 最多 17 路外部通道 - 可在休眠模式下进行转换 : - 最多 2 个 - 低功耗 / 高速模式 - ( 同相 ) 反相输入上的固定电压参考 - 可从外部访问输出 5 位数模转换器 (Digit") 采用 XLP 技术的全功能低引脚数单片机产品简介 说明 : 单片机具有模拟 内核独立外设以及通信外设特性, 并结合了超低功耗 (extreme Low Power,XLP) 技术, 适用于一系列广泛的通用和低功耗应用 外设引脚选择 (Peripheral Pin Select, PPS) 功能可以在使用数字外设 ( 和通信 ) 时进行引脚映射, 以增加应用设计的灵活性 内核特性 : 优化的 C 编译器
采用 XLP 技术的全功能低引脚数单片机产品简介 说明 : 单片机具有模拟 内核独立外设以及通信外设特性, 并结合了超低功耗 (extreme Low Power,XLP) 技术, 适用于一系列广泛的通用和低功耗应用 外设引脚选择 (Peripheral Pin Select, PPS) 功能可以在使用数字外设 ( 和通信 ) 时进行引脚映射, 以增加应用设计的灵活性 内核特性 : 优化的 C 编译器
AN2584 Microchip 32 位单片机的集成功率因数校正 (PFC) 与无传感器磁场定向控制 (FOC) 系统 简介 近年来, 电机控制行业一直致力于为各种应用设计高能效的电机控制驱动 消费者对更高电能质量标准的需求推动了这一趋势 通过实现功率因数校正 (Power Factor Corr
 与无传感器磁场定向控制 (FOC) 系统 简介 近年来, 电机控制行业一直致力于为各种应用设计高能效的电机控制驱动 消费者对更高电能质量标准的需求推动了这一趋势 通过实现功率因数校正 (Power Factor Corr") Microchip 32 位单片机的集成功率因数校正 (PFC) 与无传感器磁场定向控制 (FOC) 系统 简介 近年来, 电机控制行业一直致力于为各种应用设计高能效的电机控制驱动 消费者对更高电能质量标准的需求推动了这一趋势 通过实现功率因数校正 (Power Factor Correction,PFC) 可以增强电能质量, 使用无传感器磁场定向控制 (Field Oriented Control,FOC)
Microchip 32 位单片机的集成功率因数校正 (PFC) 与无传感器磁场定向控制 (FOC) 系统 简介 近年来, 电机控制行业一直致力于为各种应用设计高能效的电机控制驱动 消费者对更高电能质量标准的需求推动了这一趋势 通过实现功率因数校正 (Power Factor Correction,PFC) 可以增强电能质量, 使用无传感器磁场定向控制 (Field Oriented Control,FOC)
1中华人民共和国中华人民共和国中华人民共和国中华人民共和国中华人民共和国中华人民共和国中华人
 2009 年 7 月电工技术学报 Vol.24 No. 7 第 24 卷第 7 期 TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Jul. 2009 反电动势过零检测无刷直流电机转子位置新方法 李自成 1,2 程善美 1 蔡凯 1 秦忆 1 (1. 华中科技大学控制科学与工程系武汉 430074 2. 武汉工程大学电气信息学院武汉 430073) 摘要
2009 年 7 月电工技术学报 Vol.24 No. 7 第 24 卷第 7 期 TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Jul. 2009 反电动势过零检测无刷直流电机转子位置新方法 李自成 1,2 程善美 1 蔡凯 1 秦忆 1 (1. 华中科技大学控制科学与工程系武汉 430074 2. 武汉工程大学电气信息学院武汉 430073) 摘要
什么是 SSC? 如何为音频应用配置 SSC TB3175 简介 同步串行控制器 (Synchronous Serial Controller,SSC) 是一种串行同步通信模块, 可用于 Microchip 32 位 ARM Cortex -M3 Cortex -M4 和 Cortex -M7 系列
 是一种串行同步通信模块, 可用于 Microchip 32 位 ARM Cortex -M3 Cortex -M4 和 Cortex -M7 系列") 什么是 SSC? 如何为音频应用配置 SSC 简介 同步串行控制器 (Synchronous Serial Controller,SSC) 是一种串行同步通信模块, 可用于 Microchip 32 位 ARM Cortex -M3 Cortex -M4 和 Cortex -M7 系列单片机 (MCU) SSC 支持音频和电信应用中常用的多个同步通信协议, 如 I 2 S(Inter-IC Sound,
什么是 SSC? 如何为音频应用配置 SSC 简介 同步串行控制器 (Synchronous Serial Controller,SSC) 是一种串行同步通信模块, 可用于 Microchip 32 位 ARM Cortex -M3 Cortex -M4 和 Cortex -M7 系列单片机 (MCU) SSC 支持音频和电信应用中常用的多个同步通信协议, 如 I 2 S(Inter-IC Sound,
2 Bosch Rexroth AG Electric Drives and Controls 文档 功率范围 x AC 230 V 0.4 kw 至 3 x AC 400 V 90.0 kw 使用永磁式电机 内置的制动斩波器和电源滤波器 内置的操作面板, 可简单且快速地进行调试 可以通过输入输出和
 2 Bosch Rexroth AG Electric Drives and Controls 文档 功率范围 x AC 230 V 0.4 kw 至 3 x AC 400 V 90.0 kw 使用永磁式电机 内置的制动斩波器和电源滤波器 内置的操作面板, 可简单且快速地进行调试 可以通过输入输出和现场总线模块扩展 是一款经济的通用型, 转速调节可靠, 可根据需要供给能量 U/f 和矢量调节, 安装调试简便,
2 Bosch Rexroth AG Electric Drives and Controls 文档 功率范围 x AC 230 V 0.4 kw 至 3 x AC 400 V 90.0 kw 使用永磁式电机 内置的制动斩波器和电源滤波器 内置的操作面板, 可简单且快速地进行调试 可以通过输入输出和现场总线模块扩展 是一款经济的通用型, 转速调节可靠, 可根据需要供给能量 U/f 和矢量调节, 安装调试简便,
第 卷 第 期 年 月 半 导 体 学 报! " # $%&'%' $!&' #% #$1 /#1 $'! / ?/ ?/ / 3 0,?/ ) * +!!! '!,!! -. & ' $! '! 4% %&1)/1(7%&)03 (% )
 * +!!! '!,!! -. & ' $! '! 4% %&1)/1(7%&)03 (% )") 第 卷 第 期 年 月!"# $%&'%' $!&'#%#$1/#1 $'! /18103 2?/03101?/18103 /3 0,?/0301.13 )*+!!! '!,!! -.&' $!'! 4%%&1)/1(7%&)03(%)%&,%*(1&0)%$-0*,%30)17*1*)0(+1(1+&1*+*),)1; &113(%44(10&.0701&0-&00*/)%;()1%-1+%&0)0*1*)%
第 卷 第 期 年 月!"# $%&'%' $!&'#%#$1/#1 $'! /18103 2?/03101?/18103 /3 0,?/0301.13 )*+!!! '!,!! -.&' $!'! 4%%&1)/1(7%&)03(%)%&,%*(1&0)%$-0*,%30)17*1*)0(+1(1+&1*+*),)1; &113(%44(10&.0701&0-&00*/)%;()1%-1+%&0)0*1*)%
2 A-5VL ( ) 15 Onkyo A-5VL A-5VL Ct
 15 Onkyo A-5VL A-5VL Ct") 2 A-5VL 3 4 5 10 ( ) 15 Onkyo A-5VL A-5VL 17 18 Ct 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. S3125A 14. 15. A. B. C. D. E. F. 16. 17. 18. 2 0c m 8" 10cm 4" 10cm 4" Ct-2 1. 2. Onkyo 3. 4. AC120V60Hz AC220-240V50/60Hz
2 A-5VL 3 4 5 10 ( ) 15 Onkyo A-5VL A-5VL 17 18 Ct 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. S3125A 14. 15. A. B. C. D. E. F. 16. 17. 18. 2 0c m 8" 10cm 4" 10cm 4" Ct-2 1. 2. Onkyo 3. 4. AC120V60Hz AC220-240V50/60Hz
51983a - MCP mA D2PAK UG.book
 MCP630 300 ma D 2 PAK 演示板用户指南 20 Microchip Technology Inc. DS5983A_CN 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一
MCP630 300 ma D 2 PAK 演示板用户指南 20 Microchip Technology Inc. DS5983A_CN 请注意以下有关 Microchip 器件代码保护功能的要点 : Microchip 的产品均达到 Microchip 数据手册中所述的技术指标 Microchip 确信 : 在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一
英飞凌风机控制方案介绍
 英飞凌风机控制方案介绍 英飞凌科技 ( 中国 ) 有限公司 工业和多元化市场 2011 马达控制及应用技术研讨会 Table of contents 英飞凌风机方案概述 BLDC 简易正弦波风机方案介绍 BLDC 无传感器 FOC 方案介绍 5/27/2011 Copyright Infineon Technologies 2009. All rights reserved. Page 2 Table
英飞凌风机控制方案介绍 英飞凌科技 ( 中国 ) 有限公司 工业和多元化市场 2011 马达控制及应用技术研讨会 Table of contents 英飞凌风机方案概述 BLDC 简易正弦波风机方案介绍 BLDC 无传感器 FOC 方案介绍 5/27/2011 Copyright Infineon Technologies 2009. All rights reserved. Page 2 Table
1000w 1000w 风力发电机输出功率曲线图 风速 m/s 输出功率 P(w) 风速 m/s 输出功率 P(
 风速 m/s 输出功率 P(") 1000w 1000w 风力发电机输出功率曲线图 风速 m/s 3 4 5 6 7 8 9 10 11 12 输出功率 P(w) 20 65 130 240 390 580 825 1100 1300 1380 风速 m/s 13 14 15 16 17 18 19 20 21 22 输出功率 P(w) 1380 1350 1310 1255 1185 1095 990 875 735 570 1000w
1000w 1000w 风力发电机输出功率曲线图 风速 m/s 3 4 5 6 7 8 9 10 11 12 输出功率 P(w) 20 65 130 240 390 580 825 1100 1300 1380 风速 m/s 13 14 15 16 17 18 19 20 21 22 输出功率 P(w) 1380 1350 1310 1255 1185 1095 990 875 735 570 1000w
力矩电机 - 高速 (TORQUE MOTOR-HIGH SPEED) 选型目录 基本选型... 2 型号说明... 3 型号 :GTMH 型号 :GTMH 型号 :GTMH 型号 :GTMH
 选型目录 基本选型... 2 型号说明... 3 型号 :GTMH 型号 :GTMH 型号 :GTMH 型号 :GTMH") 选型目录 基本选型... 2 型号说明... 3 型号 :GTMH 0175-050... 4 型号 :GTMH 0175-070... 7 型号 :GTMH 0175-100... 10 型号 :GTMH 0175-150... 13 型号 :GTMH 0291-050... 18 型号 :GTMH 0291-070... 21 型号 :GTMH 0291-100... 24 型号 :GTMH 0291-150...
选型目录 基本选型... 2 型号说明... 3 型号 :GTMH 0175-050... 4 型号 :GTMH 0175-070... 7 型号 :GTMH 0175-100... 10 型号 :GTMH 0175-150... 13 型号 :GTMH 0291-050... 18 型号 :GTMH 0291-070... 21 型号 :GTMH 0291-100... 24 型号 :GTMH 0291-150...
PowerPoint 演示文稿
 The BitCoin Scripting Language 交易实例 交易结构 "result": { "txid": "921a dd24", "hash": "921a dd24", "version": 1, "size": 226, "locktime": 0, "vin": [ ], "vout": [ ], "blockhash": "0000000000000000002c510d
The BitCoin Scripting Language 交易实例 交易结构 "result": { "txid": "921a dd24", "hash": "921a dd24", "version": 1, "size": 226, "locktime": 0, "vin": [ ], "vout": [ ], "blockhash": "0000000000000000002c510d
2 A-5VL Onkyo A-5VL A-5VL Cs
 2 A-5VL 3 4 5 10 15 Onkyo A-5VL A-5VL 17 18 Cs 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. S3125A 14. 15. : A. B. C. D. E. F. 16. 17. 18. 20cm 8 " 10c m 4" 10cm 4" Cs-2 1. 2. Onkyo 3. 4. : AC120V 60Hz AC220-240V
2 A-5VL 3 4 5 10 15 Onkyo A-5VL A-5VL 17 18 Cs 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. S3125A 14. 15. : A. B. C. D. E. F. 16. 17. 18. 20cm 8 " 10c m 4" 10cm 4" Cs-2 1. 2. Onkyo 3. 4. : AC120V 60Hz AC220-240V
01020B.book
 使用 MSSP 进行 Microwire 串行 EEPROM 与 PIC18 器件的接口设计 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. 当前市场上有许多不同的单片机用于嵌入式控制应用领域 许多这种嵌入式控制系统都需要非易失性存储器 由于外形小巧 提供字节级灵活性 I/O 引脚要求低 低功耗和低成本等特点, 串行 EEPROM 成为非易失性存储器的流行选择
使用 MSSP 进行 Microwire 串行 EEPROM 与 PIC18 器件的接口设计 作者 : 引言 Martin Kvasnicka Microchip Technology Inc. 当前市场上有许多不同的单片机用于嵌入式控制应用领域 许多这种嵌入式控制系统都需要非易失性存储器 由于外形小巧 提供字节级灵活性 I/O 引脚要求低 低功耗和低成本等特点, 串行 EEPROM 成为非易失性存储器的流行选择
ICD ICD ICD ICD ICD
 MPLAB ICD2 MPLAB ICD2 PIC MPLAB-IDE V6.0 ICD2 usb PC RS232 MPLAB IDE PC PC 2.0 5.5V LED EEDATA MPLAB ICD2 Microchip MPLAB-IDE v6.0 Windows 95/98 Windows NT Windows 2000 www.elc-mcu.com 1 ICD2...4 1.1 ICD2...4
MPLAB ICD2 MPLAB ICD2 PIC MPLAB-IDE V6.0 ICD2 usb PC RS232 MPLAB IDE PC PC 2.0 5.5V LED EEDATA MPLAB ICD2 Microchip MPLAB-IDE v6.0 Windows 95/98 Windows NT Windows 2000 www.elc-mcu.com 1 ICD2...4 1.1 ICD2...4
Rotork new IQ brochure
 Rotork IQ Rotork IQ 3 40 4 5 6 7 Rotork 8 10 12 14 16 18 20 Rotork Rotork Rotork Controls Ltd, Bath, UK 2 Rotork Controls Inc, Rochester, USA Rotork IQ Rotork IQ IQ Rotork IQ Rotork IQ IQ Rotork IQ IQ
Rotork IQ Rotork IQ 3 40 4 5 6 7 Rotork 8 10 12 14 16 18 20 Rotork Rotork Rotork Controls Ltd, Bath, UK 2 Rotork Controls Inc, Rochester, USA Rotork IQ Rotork IQ IQ Rotork IQ Rotork IQ IQ Rotork IQ IQ
Hong Kong Pavilion.pdf
 18 th Shanghai International Children Maternity Industry Expo 25-27 / 7 / 2018 National Exhibition and Convention Center Shanghai 18 th Shanghai International Children Maternity Industry Expo CBME 25-27
18 th Shanghai International Children Maternity Industry Expo 25-27 / 7 / 2018 National Exhibition and Convention Center Shanghai 18 th Shanghai International Children Maternity Industry Expo CBME 25-27
RW Salary Survey 2015 - China A4
 2015 中国 2014年 中国政府实施从纯制造业和基础设施行业向高科 技行业的转型 加强专业服务和消费者领域发展 以出口 刺激经济增长 由于政府的投资政策重新定位 我们看到越来越多的研发 中心在国内成立 更多国际专业服务公司进入中国市场 奢侈品及零售品牌进驻苏州 杭州 南京和成都等二线城 市 带动了当地市场的招聘需求 纵观总体经济 经济普遍增长 就业市场前景乐观 雇员 与雇主信心增强 2014年前三季度GDP增长率达7.4%
2015 中国 2014年 中国政府实施从纯制造业和基础设施行业向高科 技行业的转型 加强专业服务和消费者领域发展 以出口 刺激经济增长 由于政府的投资政策重新定位 我们看到越来越多的研发 中心在国内成立 更多国际专业服务公司进入中国市场 奢侈品及零售品牌进驻苏州 杭州 南京和成都等二线城 市 带动了当地市场的招聘需求 纵观总体经济 经济普遍增长 就业市场前景乐观 雇员 与雇主信心增强 2014年前三季度GDP增长率达7.4%
00905A.book
 有刷直流电机基础 AN905 作者 : 简介 有刷直流电机被广泛用于从玩具到按钮调节式汽车坐椅的应用中 有刷直流 (Brushed DC, BDC) 电机价格便宜 易于驱动并且易于制造成各种尺寸和形状 本应用笔记将讨论 BDC 电机的工作原理 驱动 BDC 电机的方法以及将驱动电路与 PIC 单片机接口的方法 工作原理 Reston Condit Microchip Technology Inc.
有刷直流电机基础 AN905 作者 : 简介 有刷直流电机被广泛用于从玩具到按钮调节式汽车坐椅的应用中 有刷直流 (Brushed DC, BDC) 电机价格便宜 易于驱动并且易于制造成各种尺寸和形状 本应用笔记将讨论 BDC 电机的工作原理 驱动 BDC 电机的方法以及将驱动电路与 PIC 单片机接口的方法 工作原理 Reston Condit Microchip Technology Inc.
SMK环境报告书2009
 Contents 1995SMK corporate citizen RoHSRoHSJ-MossREACH SMK CO2 298 28 1 2 3 4 4 5 6 7 9 1 28284129331 Gate City Office ASIA SMK High-Tech Taiwan Trading Co., Ltd. SMK Electronics (H.K.) Ltd. SMK Trading
Contents 1995SMK corporate citizen RoHSRoHSJ-MossREACH SMK CO2 298 28 1 2 3 4 4 5 6 7 9 1 28284129331 Gate City Office ASIA SMK High-Tech Taiwan Trading Co., Ltd. SMK Electronics (H.K.) Ltd. SMK Trading
CHCN_8-14_K.indd
 是德科技 三个理由让您选择深存储快响应示波器 应用指南 介绍 1. 更长的波形捕获时间 = / 1 1 Mpts 10 GSa/s 1 2 100 Mpts 10 1. = / 1 Mpts 10 GSa/s 1 ms 2. = / 100 Mpts 10 GSa/s 10 ms 3 12.5 Mpts 3 300 Kpts 3 3. 3 12.5 Mpts 3 300 Kpts? Agilent
是德科技 三个理由让您选择深存储快响应示波器 应用指南 介绍 1. 更长的波形捕获时间 = / 1 1 Mpts 10 GSa/s 1 2 100 Mpts 10 1. = / 1 Mpts 10 GSa/s 1 ms 2. = / 100 Mpts 10 GSa/s 10 ms 3 12.5 Mpts 3 300 Kpts 3 3. 3 12.5 Mpts 3 300 Kpts? Agilent
 质量体系认证证书 IS O900 0认证证书 国军标体系认证证书 企业文化 企业愿景 创新型 节能 绿色 高可靠性电子产品 品牌服务商 宗 旨 创新改变人生 发展造就个人 企业 社会的共赢 使 命 以开拓思维谋求创新 以创新求发展 以发展提升员工 股东价值 提高顾客 竞争力 履行社会责任 企业精神 以开拓创新谋发展 以持续改进促完善 以价值增值为己任 以共赢互进为目标 创新 改进 发展 思维创新 技术创新
质量体系认证证书 IS O900 0认证证书 国军标体系认证证书 企业文化 企业愿景 创新型 节能 绿色 高可靠性电子产品 品牌服务商 宗 旨 创新改变人生 发展造就个人 企业 社会的共赢 使 命 以开拓思维谋求创新 以创新求发展 以发展提升员工 股东价值 提高顾客 竞争力 履行社会责任 企业精神 以开拓创新谋发展 以持续改进促完善 以价值增值为己任 以共赢互进为目标 创新 改进 发展 思维创新 技术创新
untitled
 Headquarters Nakanoshima Mitsui Building 3-3-3 Nakanoshima, Kita-ku Osaka, 530-0005, Japan Phone : +81-6-6441-0011 URL : http://tsubakimoto.com Chain & Power Transmission Sales 1-3 Kannabidai 1-chome Kyoutanabe,
Headquarters Nakanoshima Mitsui Building 3-3-3 Nakanoshima, Kita-ku Osaka, 530-0005, Japan Phone : +81-6-6441-0011 URL : http://tsubakimoto.com Chain & Power Transmission Sales 1-3 Kannabidai 1-chome Kyoutanabe,
EPSON Safety Instructions Manual
 ... 2... 9... 11... 12 Epson... 14 1 2 3 4 5 ( ) A/V 50cm 6 7 + - 8 LCD LCD LCD 9 14 UL NEMKO CSA FIMKO BSI LCIE IMQ CEBEC SAA KEMA OVE PSE SEV EK SEMKO CCC DEMKO PSB VDE 10 CD-ROM http://www.epson.com
... 2... 9... 11... 12 Epson... 14 1 2 3 4 5 ( ) A/V 50cm 6 7 + - 8 LCD LCD LCD 9 14 UL NEMKO CSA FIMKO BSI LCIE IMQ CEBEC SAA KEMA OVE PSE SEV EK SEMKO CCC DEMKO PSB VDE 10 CD-ROM http://www.epson.com
678859(ABC AR_Chi)_.indb
_.indb") 195170 2009 1 2010 7 2013145,621.02 118,114.11 72,247.1311.86%1.22%1,662.11 23,547 337 3513,506 19,64873 12 93 2013 50064 1,0002012102013 A/A-1A1/P-1 A/F1 2 4 6 10 12 15 19 19 21 22 44 64 68 87 89 95 110
195170 2009 1 2010 7 2013145,621.02 118,114.11 72,247.1311.86%1.22%1,662.11 23,547 337 3513,506 19,64873 12 93 2013 50064 1,0002012102013 A/A-1A1/P-1 A/F1 2 4 6 10 12 15 19 19 21 22 44 64 68 87 89 95 110
untitled
 3 4 Watson Farley & Williams 5 6 Watson Farley & Williams 7 9 10 Watson Farley & Williams 11 ATHENS BANGKOK DUBAI FRANKFURT HAMBURG HONG KONG LONDON MADRID MILAN MUNICH NEW YORK PARIS ROME SINGAPORE wfw.com
3 4 Watson Farley & Williams 5 6 Watson Farley & Williams 7 9 10 Watson Farley & Williams 11 ATHENS BANGKOK DUBAI FRANKFURT HAMBURG HONG KONG LONDON MADRID MILAN MUNICH NEW YORK PARIS ROME SINGAPORE wfw.com
 Power & Flexibility MEIDEN MOTOR DRIVE SYSTEM MEIDEN MOTOR DRIVE SYSTEM Meiden Europe Ltd. Meiden America, Inc. Meiden Technical Center North America LLC Dubai Branch Meiden India Pvt. Ltd. Meiden
Power & Flexibility MEIDEN MOTOR DRIVE SYSTEM MEIDEN MOTOR DRIVE SYSTEM Meiden Europe Ltd. Meiden America, Inc. Meiden Technical Center North America LLC Dubai Branch Meiden India Pvt. Ltd. Meiden
AN901.book
 dspic30f 在 无 传 感 器 BLDC 控 制 中 的 应 用 AN901 著 者 : 合 著 者 : 引 言 本 应 用 笔 记 描 述 了 一 种 完 全 可 行 且 高 度 灵 活 的 软 件 应 用, 使 用 dspic30f 来 控 制 无 传 感 器 无 刷 直 流 (brushless DC,BLDC) 电 机 此 软 件 将 dspic30f 外 设 广 泛 应 用 于 电
dspic30f 在 无 传 感 器 BLDC 控 制 中 的 应 用 AN901 著 者 : 合 著 者 : 引 言 本 应 用 笔 记 描 述 了 一 种 完 全 可 行 且 高 度 灵 活 的 软 件 应 用, 使 用 dspic30f 来 控 制 无 传 感 器 无 刷 直 流 (brushless DC,BLDC) 电 机 此 软 件 将 dspic30f 外 设 广 泛 应 用 于 电
数字带通 带阻 高通滤波器的设计 把一个归一化原型模拟低通滤波器变换成另一个所需类型的模拟滤波器, 再将其数字化 直接从模拟滤波器通过一定的频率变换关系完成所需类型数字滤波器的设计 先设计低通型的数字滤波器, 再用数字频率变化方法将其转换成所需类型数字滤波器
 数字带通 带阻 高通滤波器的设计 把一个归一化原型模拟低通滤波器变换成另一个所需类型的模拟滤波器, 再将其数字化 直接从模拟滤波器通过一定的频率变换关系完成所需类型数字滤波器的设计 先设计低通型的数字滤波器, 再用数字频率变化方法将其转换成所需类型数字滤波器 模拟原型方法 : 模拟低通 - 模拟带通 H ( j) H ( j) 3 3 3 模拟原型方法 : 模拟低通 - 模拟带通 H ( j) 模拟低通
数字带通 带阻 高通滤波器的设计 把一个归一化原型模拟低通滤波器变换成另一个所需类型的模拟滤波器, 再将其数字化 直接从模拟滤波器通过一定的频率变换关系完成所需类型数字滤波器的设计 先设计低通型的数字滤波器, 再用数字频率变化方法将其转换成所需类型数字滤波器 模拟原型方法 : 模拟低通 - 模拟带通 H ( j) H ( j) 3 3 3 模拟原型方法 : 模拟低通 - 模拟带通 H ( j) 模拟低通
70638A.book
 AN1078 调整指南 1.1 了解所使用的 PMSM 本文档介绍了使用 FOC 算法实现永磁同步电机 (Permanent Magnet Synchronous Motor, PMSM) 调整所需的步骤和设置, 该算法如 AN1078 PMSM 电机的无传感器磁场定向控制 (DS01078A_CN) 中所介绍 由于不同电机存在参数差异, 因此需针对每种新的电机模型对该算法进行调整 在使用 FOC
AN1078 调整指南 1.1 了解所使用的 PMSM 本文档介绍了使用 FOC 算法实现永磁同步电机 (Permanent Magnet Synchronous Motor, PMSM) 调整所需的步骤和设置, 该算法如 AN1078 PMSM 电机的无传感器磁场定向控制 (DS01078A_CN) 中所介绍 由于不同电机存在参数差异, 因此需针对每种新的电机模型对该算法进行调整 在使用 FOC
,,, PCB, AR M VxWorks DSP,,,,,,,,,,, (CIP) /,,.:,2005 ISBN TP36 CIP (2005) : ( 10 ) : : (010 ) : (010)
 /,,.:,2005 ISBN TP36 CIP (2005) : ( 10 ) : : (010 ) : (010)") ,,, PCB, AR M VxWorks DSP,,,,,,,,,,, (CIP) /,,.:,2005 ISBN 7-5635-1099-0...............TP36 CIP (2005)076733 : ( 10 ) :100876 : (010 )62282185 : (010)62283578 : publish@bupt.edu.cn : : : 787 mm960 mm 1/
,,, PCB, AR M VxWorks DSP,,,,,,,,,,, (CIP) /,,.:,2005 ISBN 7-5635-1099-0...............TP36 CIP (2005)076733 : ( 10 ) :100876 : (010 )62282185 : (010)62283578 : publish@bupt.edu.cn : : : 787 mm960 mm 1/
控制器 EtherCAT EtherCAT EtherCAT 接下一个电机驱动模块 (X4) 接下一个电机驱动模块 (X5) X11 IN X4 IN X3 OUT X5 IN X6 OUT X2 X1 X4 IN X3 OUT X5 IN X6 OUT X2 X1 SYS STA DC BUS D
 接下一个电机驱动模块 (X5) X11 IN X4 IN X3 OUT X5 IN X6 OUT X2 X1 X4 IN X3 OUT X5 IN X6 OUT X2 X1 SYS STA DC BUS D") 控制器 thert thert thert 接下一个电机驱动模块 () 接下一个电机驱动模块 () 电机驱动模块 电机驱动模块 电源模块 接下一个电机驱动模块 () 接下一个电机驱动模块 () 接下一个电机驱动模块 () 接下一个电机驱动模块 () X 0 X 0 4 /RK /RK 注 注 制动电阻阻值 Ω Φ 80: 适用电机驱动模块型号 8-M-XXXX--XX Φ : 适用电机驱动模块型号
控制器 thert thert thert 接下一个电机驱动模块 () 接下一个电机驱动模块 () 电机驱动模块 电机驱动模块 电源模块 接下一个电机驱动模块 () 接下一个电机驱动模块 () 接下一个电机驱动模块 () 接下一个电机驱动模块 () X 0 X 0 4 /RK /RK 注 注 制动电阻阻值 Ω Φ 80: 适用电机驱动模块型号 8-M-XXXX--XX Φ : 适用电机驱动模块型号
2 PIC PIC 1 / CPU PIC MCU PIC RC
 2 PIC PIC 1 /... 2-2 2... 2-3 3... 2-4 4... 2-4 5... 2-4 6 CPU... 2-5 7 PIC MCU... 2-6 8 PIC16... 2-6 9... 2-7 10... 2-7 11 RC... 2-7 12... 2-8 13... 2-8 14 NOP... 2-9 15 PMD... 2-9 16... 2-10 17 WDTWDT...
2 PIC PIC 1 /... 2-2 2... 2-3 3... 2-4 4... 2-4 5... 2-4 6 CPU... 2-5 7 PIC MCU... 2-6 8 PIC16... 2-6 9... 2-7 10... 2-7 11 RC... 2-7 12... 2-8 13... 2-8 14 NOP... 2-9 15 PMD... 2-9 16... 2-10 17 WDTWDT...
 2016 8 252016 15 12 2016 2 3 5 8 51 53 56 58 65 68 73 74 77 78 235 62 2016 1 12016 6 30 BBM Banco BBM S.A. 2 Bank of Communications Co.,Ltd. 188 86-21-58766688 86-21-58798398 investor@bankcomm.com 200120
2016 8 252016 15 12 2016 2 3 5 8 51 53 56 58 65 68 73 74 77 78 235 62 2016 1 12016 6 30 BBM Banco BBM S.A. 2 Bank of Communications Co.,Ltd. 188 86-21-58766688 86-21-58798398 investor@bankcomm.com 200120
PIC 单片机的信号测量定时器 TB3129 作者 : 摘要 Ashutosh Tiwari Microchip Technology Inc. 本技术简介介绍了灵活且非常有用的信号测量定时器 (Signal Measurement Timer,SMT) SMT 是一个具有高级时钟和门控逻辑的 24
 SMT 是一个具有高级时钟和门控逻辑的 24") PIC 单片机的信号测量定时器 作者 : 摘要 Ashutosh Tiwari Microchip Technology Inc. 本技术简介介绍了灵活且非常有用的信号测量定时器 (Signal Measurement Timer,SMT) SMT 是一个具有高级时钟和门控逻辑的 24 位计数器 / 定时器, 在许多 PIC 单片机上可用 它可以测量各种数字信号参数, 例如脉宽 频率 占空比和两个信号边沿之间的时间差
PIC 单片机的信号测量定时器 作者 : 摘要 Ashutosh Tiwari Microchip Technology Inc. 本技术简介介绍了灵活且非常有用的信号测量定时器 (Signal Measurement Timer,SMT) SMT 是一个具有高级时钟和门控逻辑的 24 位计数器 / 定时器, 在许多 PIC 单片机上可用 它可以测量各种数字信号参数, 例如脉宽 频率 占空比和两个信号边沿之间的时间差