Selected journal publications ( ) 1. Y. J. Wang*, C. Lee, Y. B. Jiang, K. C. Fu, Design and dynamic analysis of a piezoelectric linear stage for
|
|
|
- 驿 濮
- 5 years ago
- Views:
Transcription


















")


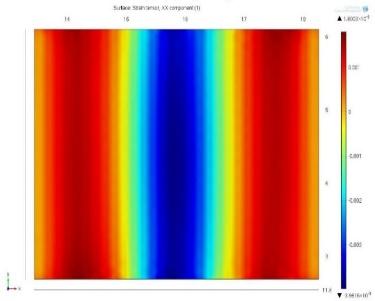


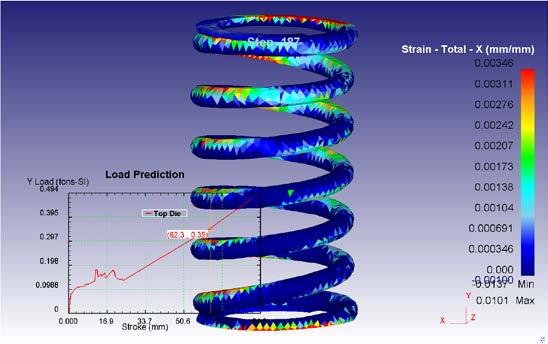

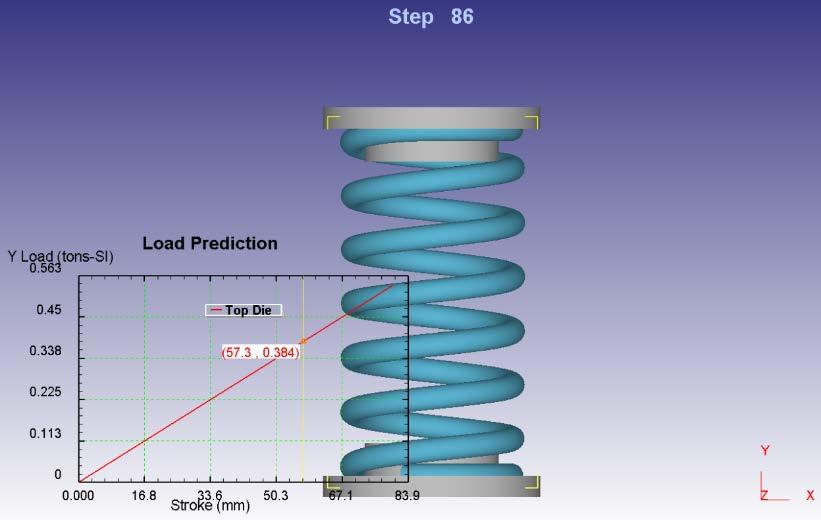
1 精密機械系統研究室 (PMS Lab) Precision Machinery Systems Lab 負責老師 王郁仁 Yu-Jen Wang Automation technologies: 實現自動化組裝 邁向工業4. Force sensor for robot arm 機器手臂力量感測模組 F𝑥𝑥 1 F𝑦𝑦 = 𝛼𝛼 F𝑧𝑧 4 𝑇𝑇𝑧𝑧 6 and 4-axis force/torque sensors design, Calibration machine 4 4 𝐺𝐺1 𝐺𝐺2 𝐺𝐺3 𝐺𝐺5 𝐺𝐺4 𝐺𝐺9 𝐺𝐺6 𝐺𝐺1 𝐺𝐺7 𝐺𝐺13 𝐺𝐺11 𝐺𝐺8 𝐺𝐺14 𝐺𝐺12 𝐺𝐺15 𝐺𝐺 Multi-axis coupling matrix 𝜀𝜀1 𝜀𝜀2 𝜀𝜀 𝛽𝛽 4 1 Robot arm integration Fast assembly stage 快速組裝定位平台 Piezo stage for pico-liter liquid feeding using capillarity force Bi-axis PZT stage and Resonance frequency tracking circuit Medical devices: 銀髮族照護 智慧型手錶血壓脈搏監控 Watch type manometer using sphygmus strain 應變型血壓計, 實現智慧型手錶血壓監控功能 SBP,DBP (收縮壓與舒張壓) Strain signals of strain sensor Blood Pressure Skin-vessel model Finite element model Strain map Scenarios and adjustable watchband for strain-type wrist manometers Green energy:能量擷取技術於船體動能轉換與感測器供電 Stator and coils 電壓(V) 1 Front side of eccentric rotor.8.6 damping=.5(n-s/kg/m).4 damping=1(n-s/kg/m).2 damping=1.5(n-s/kg/m) 車速 (km/h) Enhancement of rolling energy conversion of boats using eccentric rotors Nonlinear spring and rotor types energy harvester for TPMS, Prototypes Industry service: 產學合作 協助建立分析與研發能力 汽機車彈簧應變應力分析與模擬 異型彈簧設計與剛性分析 Dynamics analysis Solid mechanism Precision stage design Actuator design 培 養 學 生 實 務 型 研 究 技 術 開 發 能 力 深 耕 精 密 機 電 系 統 專 業 技 術 前 瞻 工 業 與 產 品 應 用 作 為 研 究 方 向 合作對象 科技部 工研院 斯特樂科技 闔康生物科技 金屬中心 向騰科技 誠芳太陽能 上銀科技 持續增加中
 654 2. Y. J. Wang*, T. Y. Chuang, J. H.")
 84-94 4. Y. J. Wang*, T. Y. Chen, M. C. Tsai and C. H.")
 21-31. 6. Y. J. Wang*, K. C.")
2 Selected journal publications ( ) 1. Y. J. Wang*, C. Lee, Y. B. Jiang, K. C. Fu, Design and dynamic analysis of a piezoelectric linear stage for pipetting liquid samples, Smart Materials and Structures, 26 6 (217) Y. J. Wang*, T. Y. Chuang, J. H. Yu, Design and Kinetic Analysis of Piezoelectric Energy Harvesters with Self-adjusting Resonant frequency, Smart Materials and Structures, 26 9 (217) C. Lee*, Y. J. Wang, Psychrometer based on a contactless infrared thermometer with a predictive model for water evaporation, Biosystems Engineering, 16 (217) Y. J. Wang*, T. Y. Chen, M. C. Tsai and C. H. Wu, Noninvasive blood pressure monitor using strain gauges, a fastening band, and a wrist elasticity model, Sensors and Actuators A, 252(1) (216) Y. J. Wang*, J. H. Yu, Enhancement of rolling energy conversion of a boat using an eccentric rotor revolving in a hula-hoop motion, Ocean Engineering, 116 (216) Y. J. Wang*, K. C. Fu, C. C. Wang, A Smart Pinless Ejection Mechanism Using Dual-Resonance Excitation Langevin Piezoelectric Transducers, Smart Materials and Structures, 25 1 (215) Y. J. Wang*, C. D. Chen and Chien Li, Design and analysis of a compact synthetic-jet-based air pump for large airflow, Microsystem Technologies, DOI 1.17/s x (214). 8. Y. J. Wang*, C. D. Chen and C. K. Sung, System design of a weighted-pendulum type electromagnetic generator for harvesting energy from a rotating wheel, IEEE/ASME Transactions on Mechatronics, 18, 2 (213) Y. J. Wang* and C. D. Chen, Design and jump phenomenon analysis of an eccentric ring energy harvester, Smart Mater. Struct., 22, 1 (213) 研究方向說明 王郁仁老師與研究生致力於動態系統開發, 核心技術包含機構設計 機電整合 壓電致動器與控制電路, 透過實務型研究題目培養學生機電系統設計與分析能力, 鼓勵同學提出自己的創見解決研究時所遭遇的問題 Biography: Yu-Jen Wang was born in Tainan, Taiwan, in He received his Ph.D. from Department of Power Mechanical Engineering at National Tsing Hua University, Taiwan, in 211. He served as a Manager (23 to 212) in the Micro Systems Technology Center, Industrial Technology Research Institute (ITRI), Taiwan, where he led a worldwide group working on advanced actuator systems, coordinating efforts for two product lines. Currently, he is an assistant professor of Mechanical and Electromechanical Engineering Department, National Sun Yat-sen University, Taiwan. His major research interests include machine dynamics, actuator design and energy harvesters. Prof. Wang was the recipient of the 212 CIEE Outstanding Youth Electrical Engineer Award; the 214, 215 and 217 MOST Best Project Poster Award; the 212 MOEA Excellent Achievement Project Award; and 21 National Invention Silver Medal Award. He was the Track Co-Chair of the 216 ASME ISPS and IoT conference in Santa Clara, CA, USA. Education/Qualifications Dept. of Power Mechanical Engineering, National Tsing Hua University, Dr. of Engineering Dept. of Power Mechanical Engineering, National Tsing Hua University, M. D. Employment to Date/Work Experience July 217-present Dept. of Mechanical and Electromechanical Engineering, National Sun Yat-sen University, Associate professor Aug. 214-July217 Dept. of Mechanical and Electromechanical Engineering, National Sun Yat-sen University, Assistant professor Aug. 213-July 214 Dept. of Mechanical Engineering, National Taipei University of Tech., Assistant professor. Aug. 212-July 213 Dept. of Computer-aid Engineering, National Formosa University, Assistant professor. Jan. 23-July 212 Microsystems Tech. Center, Industrial Technology Research Institute (ITRI), Department Manager. Research and professional experience Mar.-Dec. 28 Carnegie Mellon University (Penn. state USA), Visiting Researcher. Awards 218 NSYSU Best Teachers 217 Young scholar award of TCUS 217 CSME Kaohsiung branch, Outstanding Youth Mechanical Engineer Award 217 IEEE ICASI 217 First Prize Paper Award 216 IEEE ICASI 216 Best Paper Award 215 MOST Best Project Poster Award 214 MOST Best Applied Project Poster Award 212 The Chinese Institute of Electrical Engineering: Outstanding Youth Electrical Engineer Award 指導學生與服務獲獎 217 第三屆旭泰科技論文銀研獎 217 程泰工具機專題實作競賽優等 ( 第一名 ) 217 IEEE ICASI 217 First Prize Paper Award 217 SPINTECH Technology Thesis Award 217 中山大學工學院優良導師獎 216 大專院校智動化設備創作佳作獎 216 科技部應用型產學計畫海報展示優良獎 215 中山大學 跨領域工程專題競賽與成果展 銀牌
3 Research Interests Piezoelectric Actuators 精密機械系統研究室 /Precision Machinery Systems Lab (PMSL) 1




















4 Design and Fabrication of Piezoelectric Actuator with Self-Position-Sensing and Long-Stroke Piezoelectric actuator with long-stroke: Sequential excitation was used to expand the stroke of the piezoelectric actuator. Furthermore, the finite element method (COMSOL Multiphysics) was used to analyze the phase distribution of the long stroke piezoelectric actuator and define its dimension. Fastener Construction of the Self-Position-Sensing and Long-Stroke Piezoelectric Actuator: On the basis of the proposed optimum capacitive sensor, an in-plane capacitive position sensor comprising a pair of comb-shaped electrodes was produced using a PET-circuit and integrated into the piezoelectric actuator. Variance of the capacitive signal Driving circuit and specifically Kalman filter: To maintain this resonance frequency, this research designs a circuit to drive piezoelectric actuators as well as the following figure shows the block diagram of this driving circuit, which comprises four parts. Referring the variance of the capacitive signal could precisely estimate the true state of the capacitive signal in Kalman filter. Prototype and experimental results:








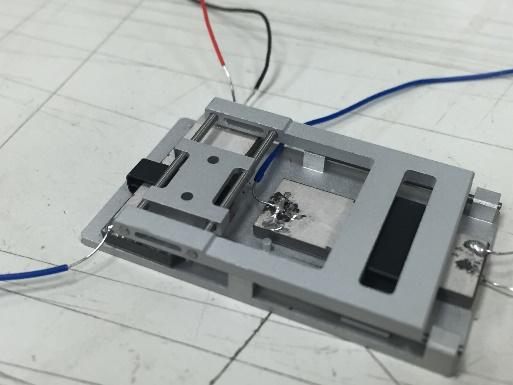
5 Piezoelectric stages for mini-parts assembly Tri-axis piezoelectric positioning stage and suction actuator A small positioning stage is achieved based on piezoelectric actuator because of its high accuracy, fast response, and low energy consumption. Research on motion of positioning stage driven by friction Based on Karnopp model, the kinetic model is established, and the equation of motion is derived. The simulation and analyzation are carried on further. Maximum stroke of linear direction is up to 6 mm; Rotary angle is not limited. Highest resolution of linear direction:.1 μm; Highest resolution of rotation:.2 Sensing resolution of linear direction :.1 μm; Sensing resolution of rotation:.324 Fast positioning Control system of driving and positioning According to position signal of optical encoder, the duty ratio of PWM signal is adjusted by PID controller to control velocity of positioning stage. As duty ratio changed, velocity changed. Fast positioning is achieved. Positioning error on X-axis is.1%, and settling time is.28 seconds. Positioning error on Y-axis is.3%, and settling time is.28 seconds. Full system is composed of a 3D camera, a long-stroke traveling stage, and a tri-axis piezoelectric positioning stage, adding driving circuit and optical encoder as driving and positioning system. 1. Shoot components by 3D camera 2. Control long-stroke traveling stage to transport components to be assembled 3. Using PID controller to make tri-axis piezoelectric positioning stage get target position fast and precisely and complete assembly 精密機械系統研究室 /Precision Machinery Systems Lab (PMSL) 3
6 Multi-Force/Torque Sensors and its Calibration Machine 4






7 Multi-axis Force/Torque Sensors for Robot Arm 1. 六軸力量 / 力矩感測器結構 創新全橋與半橋複合式應變計佈局, 使得簡單的蟹型腳受容器結構實現六軸力量 / 力矩感測 2.ANSYS 應變模擬與分析 分析各軸向主要感測彈性梁 分析應變規最佳貼附位置 分析承受最大應力 4. 感測器實體圖 完成應變規貼附 完成惠斯登電橋連接 3. 六軸向感測應變規分配 利用惠斯登電橋達成訊號放大及雜訊抵銷 將 16 個應變規分配成四組半橋及兩組全橋分別對應 6 軸感測 FF XX : 半橋 FF YY : 半橋 2-3 FF ZZ : 全橋 MM XX : 半橋 MM YY : 半橋 5-6 MM ZZ : 全橋 中山機電系王郁仁副教授 5


8 Calibration machine for Force/sensor 校正平台 : 不同的思維, 藉由力量校正平台產生力量大數據, 建立轉換矩陣 1. 給予多組穩定且可信之校正力 3. 蒐集大量的應變值找出應變與力量之間對應之轉換矩陣 command force 將力量輸入轉換成電壓 提供音圈馬達驅動版電壓 音圈馬達 Output force YY NN 6 = XX NN 6 ββ 6 6 PID controller 4. 採用 LMS 與 MLE 所計算出之誤差結果 JS-32 訊號處理 2. 以 LabVIEW 軟體整合校正系統 荷重元接收反重用力 Average error using 3rd order polynomial equation.25 %.25 %.22 % ERROR.16 %.7 %.6 % 中山機電系王郁仁副教授 Fx Fy Fz Mx My Mz 已請工研院完成第三方確認 6
9 Energy Harvesters 精密機械系統研究室 /Precision Machinery Systems Lab (PMSL) 7

 (Centrifugal Pendulum Vibration Absorbers, CPVAs) Department of")
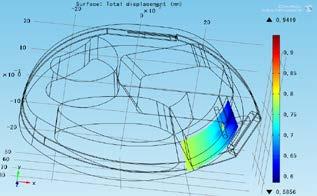
10 Motivation Energy harvesters for TPMS Commercialized TPMSs are powered by lithium batteries. Piezoelectric energy harvesters served as infinite lifetime power sources. Energy harvester creates extra load on the wheel. Why not energy harvesters behave as vibration absorbers (CPVAs)? Θ ll mm θ Torque (Tire-Pressure Monitoring System, TPMS) (Centrifugal Pendulum Vibration Absorbers, CPVAs) Department of Mechanical and Electromechanical Engineering, National Sun Yat-sen University, Taiwan 8

 I-shaped weighted block")
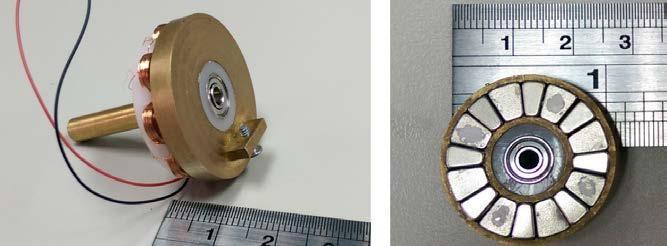
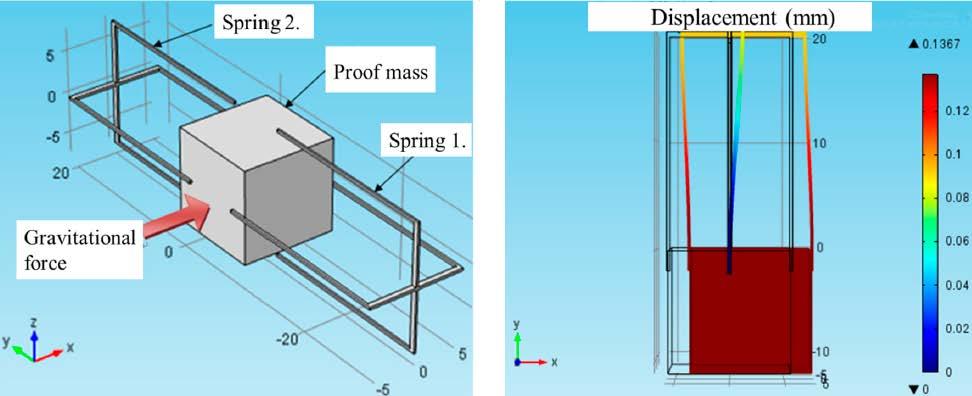
11 Energy harvesters for TPMS Introduction of Piezoelectric Energy Harvester Configuration of Energy Harvester Designing an extensible mechanism to adjust the natural frequency of system. Operating at resonance mode can get a larger swing angle of cantilever. Steel wire Roller bearing Foundation Tension spring Trapezoidal cantilever Clump weight (mm 3 ) I-shaped weighted block (mm 2 ) Department of Mechanical and Electromechanical Engineering, National Sun Yat-sen University, Taiwan 9
12 Energy harvesters for TPMS Introduction of Piezoelectric Energy Harvester Governing Equation of Energy Harvester Using Lagrange s equations to derive the dynamic equation. 1. L = TT bbbbbbbb + TT tttttt + TT wwwwwwwww UU bbbbbbbb + UU tttttt + UU wwwwwwwww d 2. dt θθ = θθ 3. II h θ + mm 2 RR 2 aaθ 2 + EEh3 2bb+4ββββ aaaa θ = 18aa 4. Natural frequency ω nn = Θ mm 2RR 2 aa II h + EEh3 2bb+4ββββ aaaa 18aaII h Θ 2 β b x a L B Department of Mechanical and Electromechanical Engineering, National Sun Yat-sen University, Taiwan 1

 14 12 1 8 6 4 2 Energy harvesters for TPMS Plate rotational speed (RPM) 2 4 6 8 5 Power(Simulation) Power(Experiment) Voltage(Simulation)")
13 Introduction of Piezoelectric Energy Harvester Experiment Results The out put power was above 1 µw from 2 to 7 km/hr. The ability of self-adjusting resonant frequency was verified by experiment. Prototype volume : mmmm 33 Department of Mechanical and Electromechanical Engineering, National Sun Yat-sen University, Taiwan Power (μw) Energy harvesters for TPMS Plate rotational speed (RPM) Power(Simulation) Power(Experiment) Voltage(Simulation) Voltage(Experiment) Equivalent car speed (km/hr) Voltage (volt) 11




 𝑠𝑠𝑠𝑠𝑠𝑠 𝑠𝑠𝑥𝑥 𝑠𝑠𝑦𝑦 = 𝑑𝑑 𝑐𝑐𝑐𝑐𝑐𝑐 𝛽𝛽 𝑐𝑐𝑐𝑐𝑐𝑐 𝜏𝜏 𝑠𝑠𝑠𝑠𝑠𝑠")
 𝑠𝑠𝑧𝑧 𝑑𝑑 𝑐𝑐𝑐𝑐𝑐𝑐 𝛽𝛽")











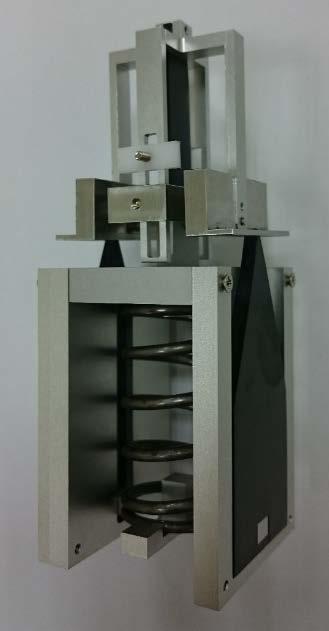
14 Development of a 2-DOF WEH based on biaxial hula-hoop motion 用於海洋浮標之雙自由度波浪能量轉換裝置 Measurements of buoy Rolling Amplitude:2 to 45 Pitching Amplitude:15 to 4 Establishment of WEH Dynamic model Applying homogeneous coordinate transformation matrices 𝑟𝑟𝑥𝑥 𝑟𝑟𝑥𝑥 𝑟𝑟𝑦𝑦 𝑟𝑟𝑧𝑧 𝑇𝑇 Location of eccentric gyro ring center 𝐻𝐻 sin 𝑟𝑟𝑦𝑦 = 𝐻𝐻 sin 𝜏𝜏 cos 𝑠𝑠𝑥𝑥 𝑠𝑠𝑦𝑦 𝑠𝑠𝑧𝑧 𝑇𝑇 Location of counterweight center 𝑟𝑟𝑧𝑧 𝐻𝐻 cos 𝜏𝜏 cos + 𝛿𝛿 𝑑𝑑 𝑐𝑐𝑐𝑐𝑐𝑐 𝑠𝑠𝑠𝑠𝑠𝑠 𝛽𝛽 + (𝐻𝐻 + 𝑑𝑑 𝑐𝑐𝑐𝑐𝑐𝑐 𝛼𝛼 𝑐𝑐𝑐𝑐𝑐𝑐 𝛽𝛽) 𝑠𝑠𝑠𝑠𝑠𝑠 𝑠𝑠𝑥𝑥 𝑠𝑠𝑦𝑦 = 𝑑𝑑 𝑐𝑐𝑐𝑐𝑐𝑐 𝛽𝛽 𝑐𝑐𝑐𝑐𝑐𝑐 𝜏𝜏 𝑠𝑠𝑠𝑠𝑠𝑠 𝛼𝛼 + 𝑐𝑐𝑐𝑐𝑐𝑐 𝛼𝛼 𝑐𝑐𝑐𝑐𝑐𝑐 𝛼𝛼 𝑠𝑠𝑠𝑠𝑠𝑠 𝜏𝜏 + 𝑠𝑠𝑠𝑠𝑠𝑠 𝜏𝜏 ( 𝐻𝐻 𝑐𝑐𝑐𝑐𝑐𝑐 + 𝑑𝑑 𝑠𝑠𝑠𝑠𝑠𝑠 𝛽𝛽 𝑠𝑠𝑠𝑠𝑠𝑠 ) 𝑠𝑠𝑧𝑧 𝑑𝑑 𝑐𝑐𝑐𝑐𝑐𝑐 𝛽𝛽 𝑠𝑠𝑠𝑠𝑠𝑠 𝛼𝛼 𝑠𝑠𝑠𝑠𝑠𝑠 𝜏𝜏 + 𝑐𝑐𝑐𝑐𝑐𝑐 𝜏𝜏 ( 𝐻𝐻 + 𝑐𝑐𝑐𝑐𝑐𝑐 𝛼𝛼 𝑐𝑐𝑐𝑐𝑐𝑐 𝛽𝛽 𝑐𝑐𝑐𝑐𝑐𝑐 𝑑𝑑 𝑠𝑠𝑠𝑠𝑠𝑠 𝛽𝛽 𝑠𝑠𝑠𝑠𝑠𝑠 + 𝛿𝛿 Basic frequency:.8 Hz Basic frequency:.8 Hz Types of eccentric gyro ring regular motions Hula-hoop motion Higher average angular velocity Higher power generation Basic frequency:.7 Hz Reciprocating motion Design of magnetic circuit Iron core coils compared to air core coils: Distribution of biaxial hula-hoop motion c𝑞𝑞𝑖𝑖 =.1 Buoy frequency:.8-1. Hz Higher Magnetic flux density (57%) Higher average gradient (49.5%) The electromagnetic damping: 𝑑𝑑𝛷𝛷𝐵𝐵𝐵𝐵 2 𝑅𝑅 : Coils resistance 𝑐𝑐 𝑑𝑑𝑑𝑑 𝑅𝑅𝐿𝐿 : External resistance 𝐶𝐶𝑒𝑒 (𝜃𝜃, 𝑡𝑡) = 𝑅𝑅𝑐𝑐 + 𝑅𝑅𝐿𝐿 𝜃𝜃: α, 𝛽𝛽 L:Lagrangian Lagrange Euler equation: 𝑑𝑑 𝐿𝐿 𝑑𝑑𝑑𝑑 𝑞𝑞𝑖𝑖 𝐿𝐿 𝑞𝑞𝑖𝑖 = c𝑞𝑞𝑖𝑖 𝑞𝑞𝑖𝑖 𝑞𝑞𝑖𝑖 α, 𝛽𝛽 c𝑞𝑞𝑖𝑖 :electromagnetic damping 𝛿𝛿:Heaving motion of buoy 𝜏𝜏:Rolling motion of buoy Biaxial hula-hoop motion compared to reciprocating motion: :Pitching motion of buoy d:distance between S and r Electrical power: about 13 times Heaving Amplitude:±.12 m Benefit of biaxial hula-hoop motion L = K e Pe H:Distance between q and r Experiment of WEH WEH system Wave spectra of buoy motions: Average output power :.17 W Circled: Biaxial hulahoop moment Voltage: α:±2 V 𝛽𝛽:±6 V 12
15 Continuous Sphygmomanometer 精密機械系統研究室 /Precision Machinery Systems Lab (PMSL) 13




 5.44 ± 5.1 (122.")
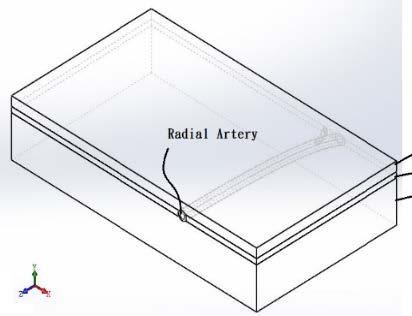
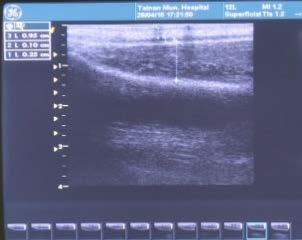
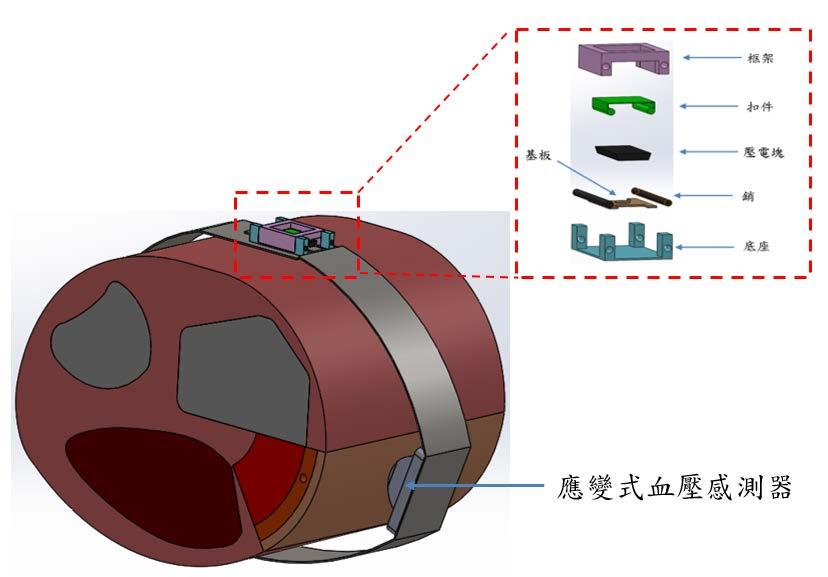
16 Estimation of blood pressure of radial artery using strain and PPG sensors 目的 透過高敏度應變感測器與 PPG 感測器訊號, 建立血壓估算方法, 實現便於長期穿戴且無拘束的血壓監測情境 Strain-based Blood Pressure Sensor PPG Sensor Sensor Base Sensor Bump Strain gage 方法 利用類比訊號與數位訊號處理模組並以 LabVIEW 進行程式演算與人機介面建立 成果 量測受試者 39 名亞洲人, 量測結果的誤差百分比 : 運動前 : DBP 為 4.93 %, SBP 為 4.44 % 運動後 : DBP 為 6.16 %, SBP 為 5.8 % 數位訊號判斷值校正常數 對照血壓 估算血壓 下壓力 應變訊號 PPG 訊號 ( 誤差平均 ± 誤差標準差 ; 單位 : mmhg),( 估算平均值 ; 單位 : mmhg) 狀態 舒張壓誤差 收縮壓誤差 運動前 3.71 ± 3.6 (77.37) 5.44 ± 5.1 (122.42) Amplify 2 nd Order Clamping Circuit Low-pass Filter PPGSensor 中山機電系王郁仁副教授 運動後 4.84 ± 3.65 (81.37) 7.4 ± 6.4 (133.43) 14